|
EvEmu
0.8.4
11 September 2021
|
|
EvEmu
0.8.4
11 September 2021
|
#include "DestinyManager.h"
Classes | |
| class | WarpState |
Public Member Functions | |
| DestinyManager (SystemEntity *self) | |
| ~DestinyManager () | |
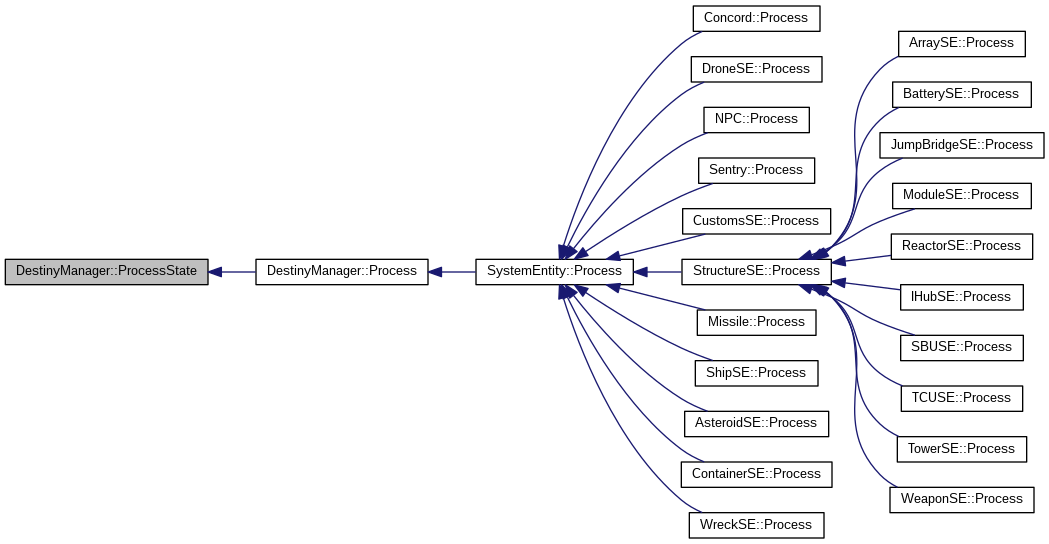
| void | Process () |
| void | SendSingleDestinyEvent (PyTuple **ev, bool self_only=false) const |
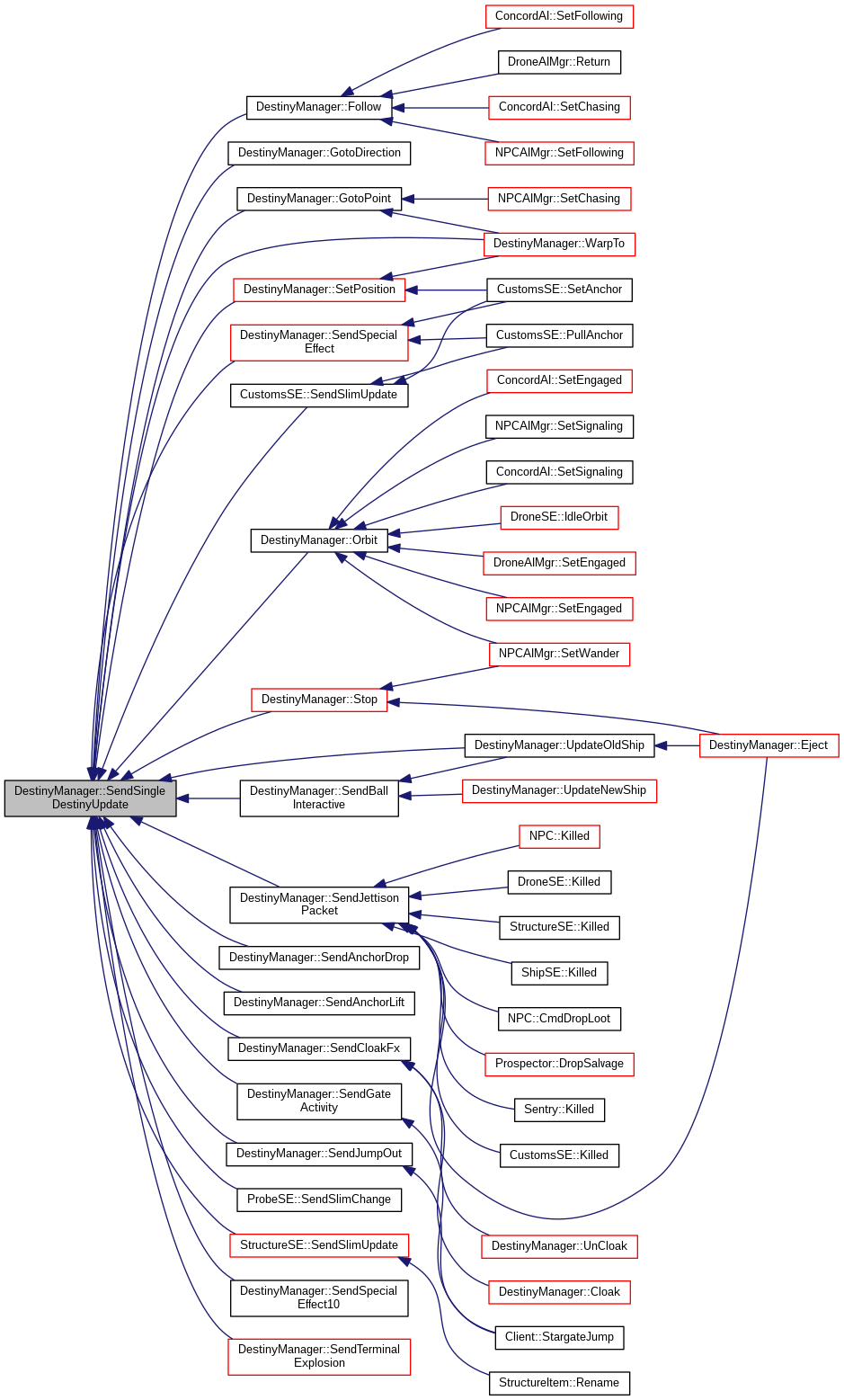
| void | SendSingleDestinyUpdate (PyTuple **up, bool self_only=false) const |
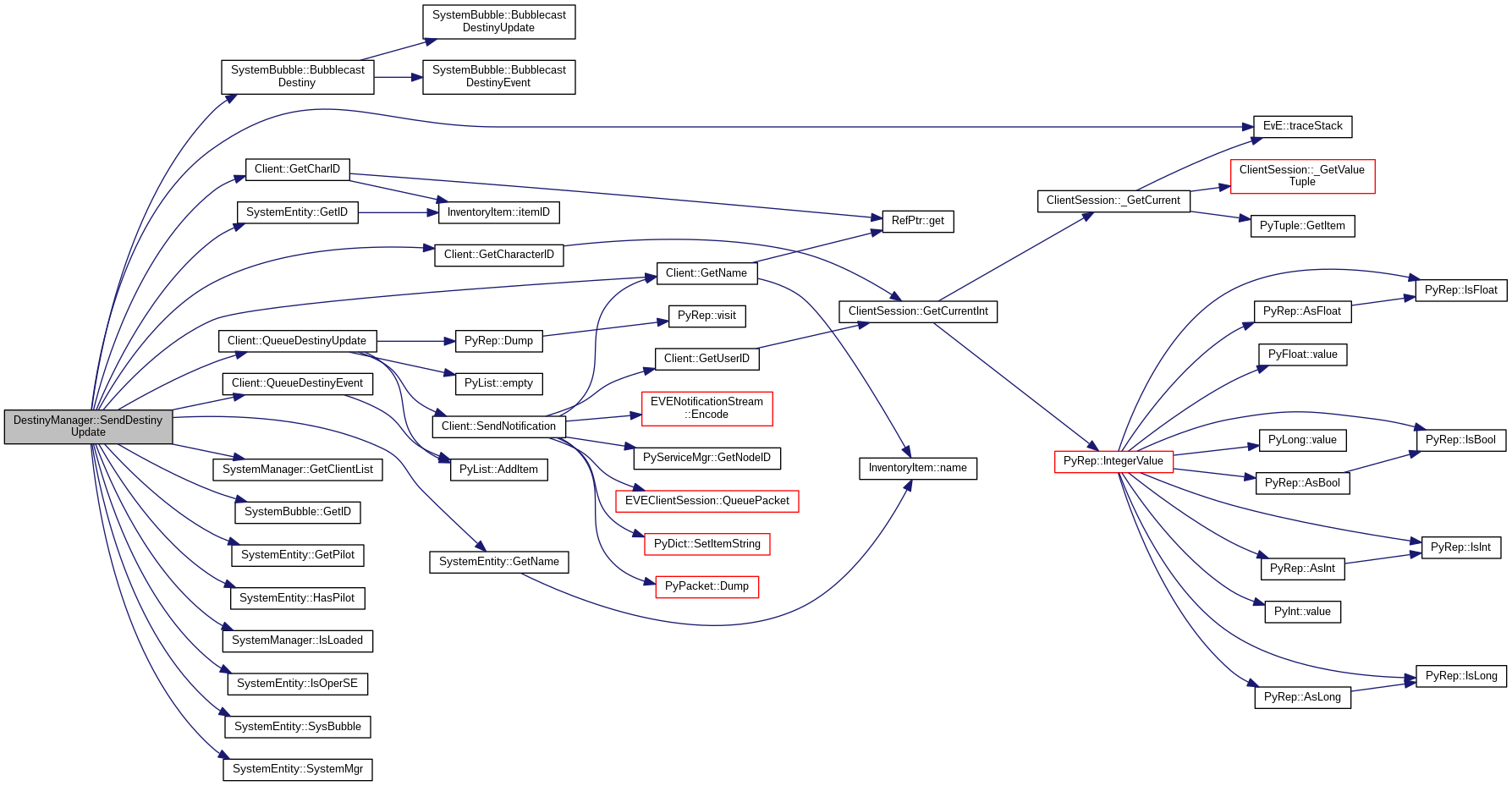
| void | SendDestinyUpdate (std::vector< PyTuple * > &updates, bool self_only=false) const |
| void | SendDestinyUpdate (std::vector< PyTuple * > &updates, std::vector< PyTuple * > &events, bool self_only=false) const |
| const GPoint & | GetPosition () const |
| const GVector & | GetVelocity () const |
| float | GetSpeedFraction () |
| float | GetSpeed () |
| uint8 | GetState () |
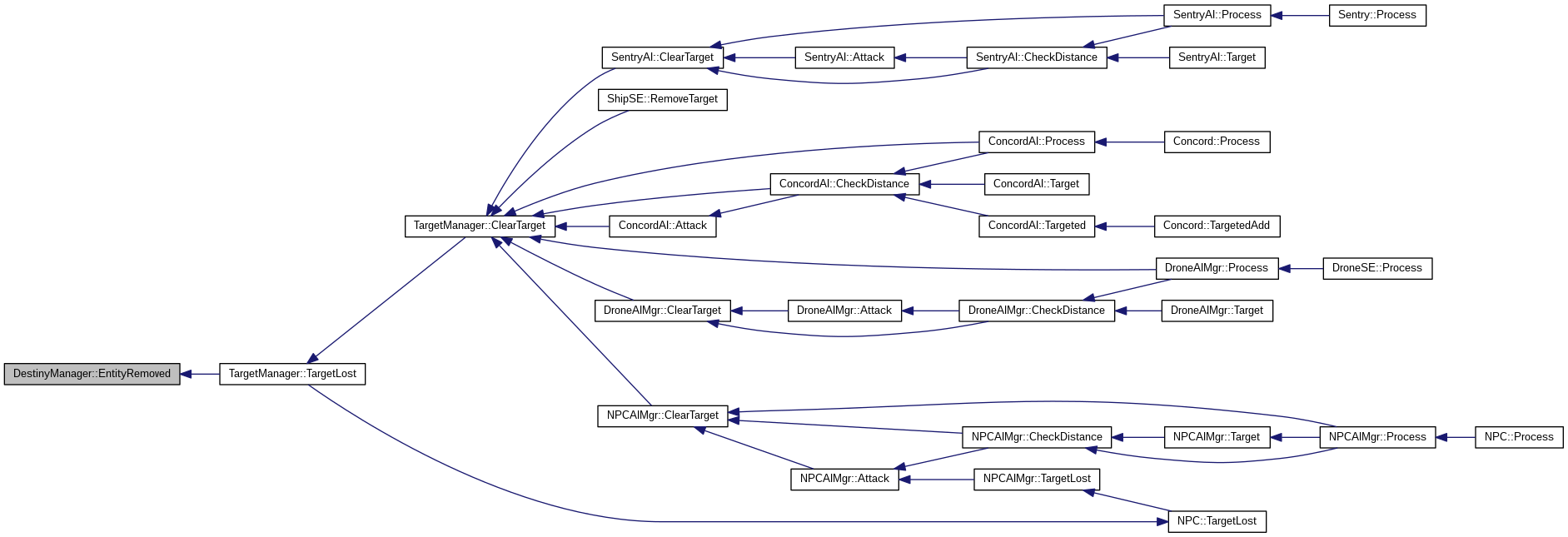
| void | EntityRemoved (SystemEntity *pSE) |
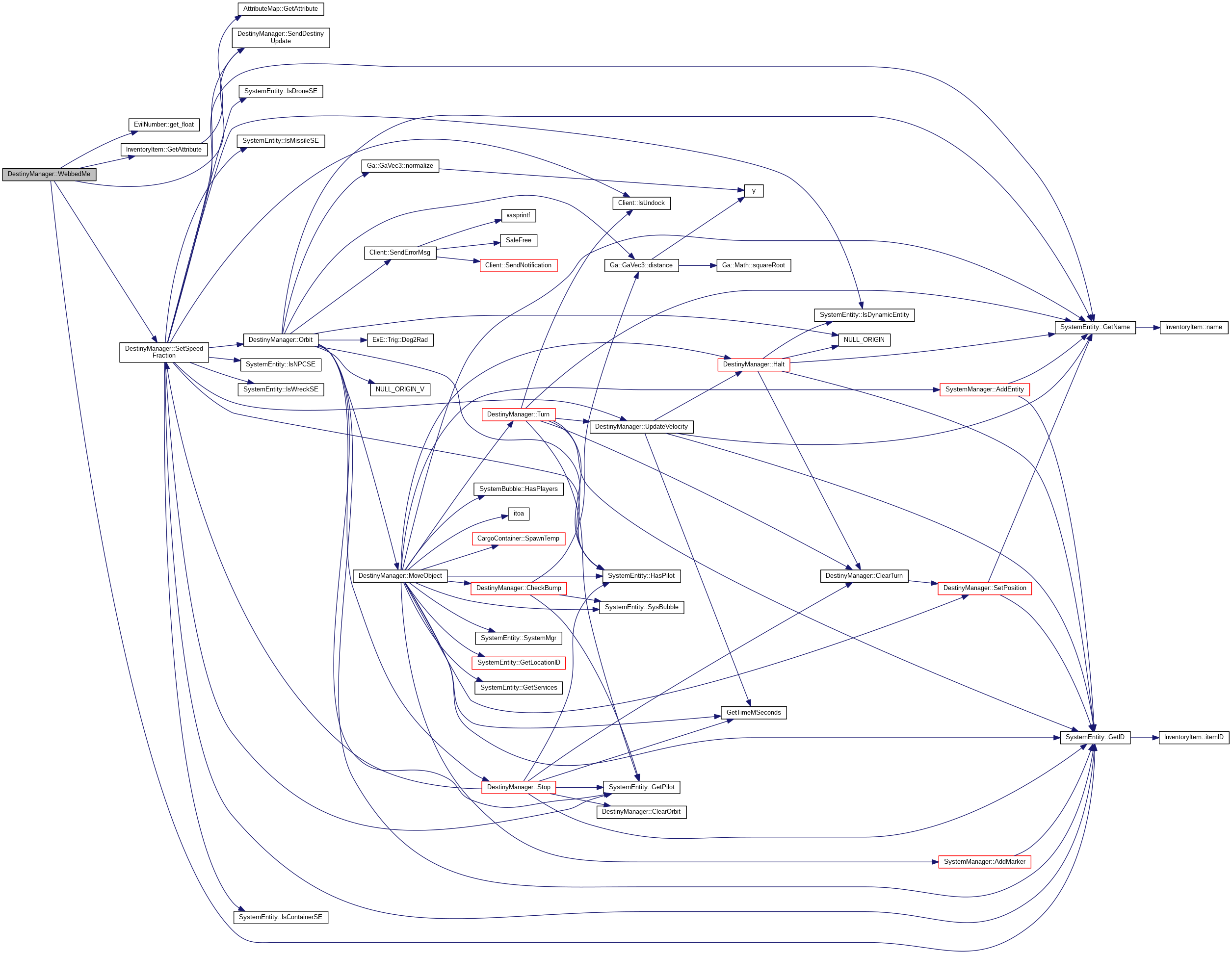
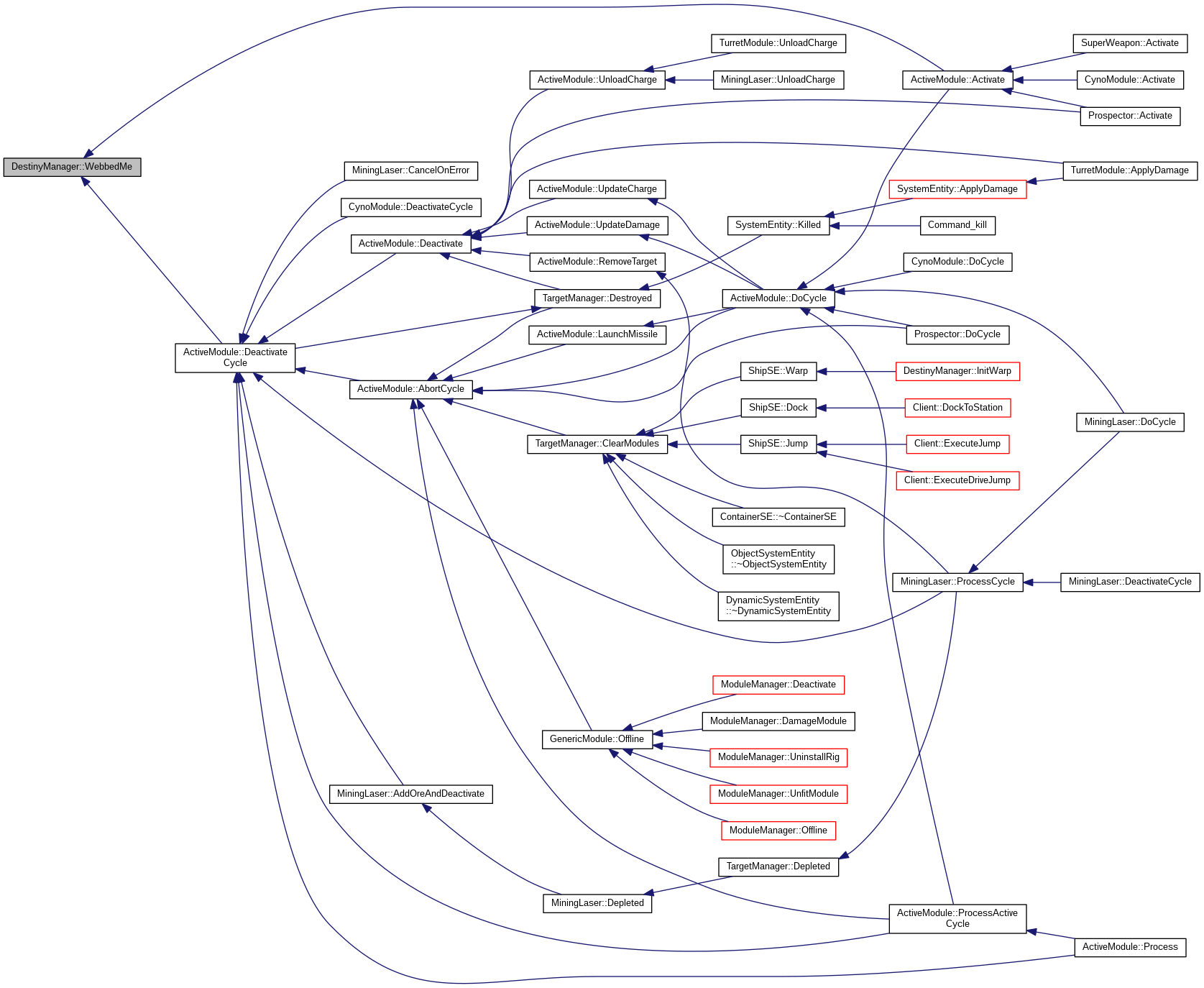
| void | WebbedMe (InventoryItemRef modRef, bool apply=false) |
| void | SetBubble (bool set=false) |
| void | SpeedBoost (bool deactivate=false) |
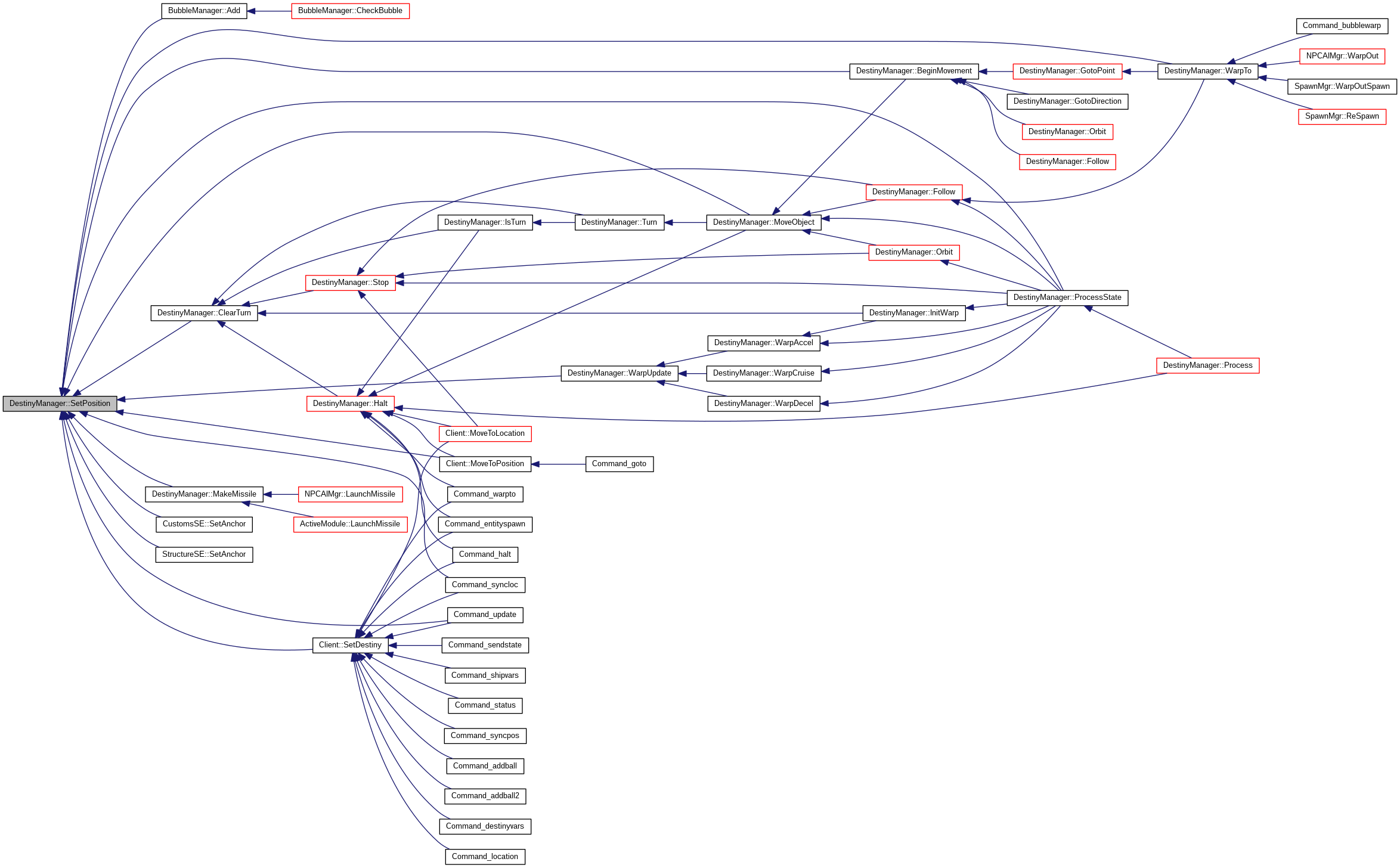
| void | SetPosition (const GPoint &pt, bool update=false) |
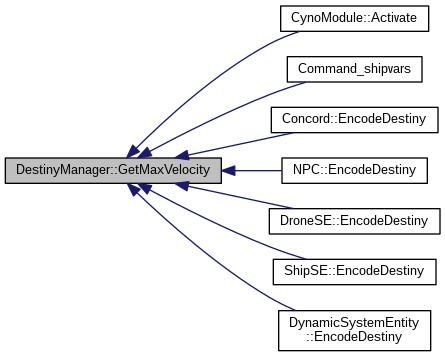
| void | SetMaxVelocity (float maxVelocity) |
| void | UpdateShipVariables () |
| void | Stop () |
| void | Halt () |
| void | Eject () |
| void | SetCloak (bool set=false) |
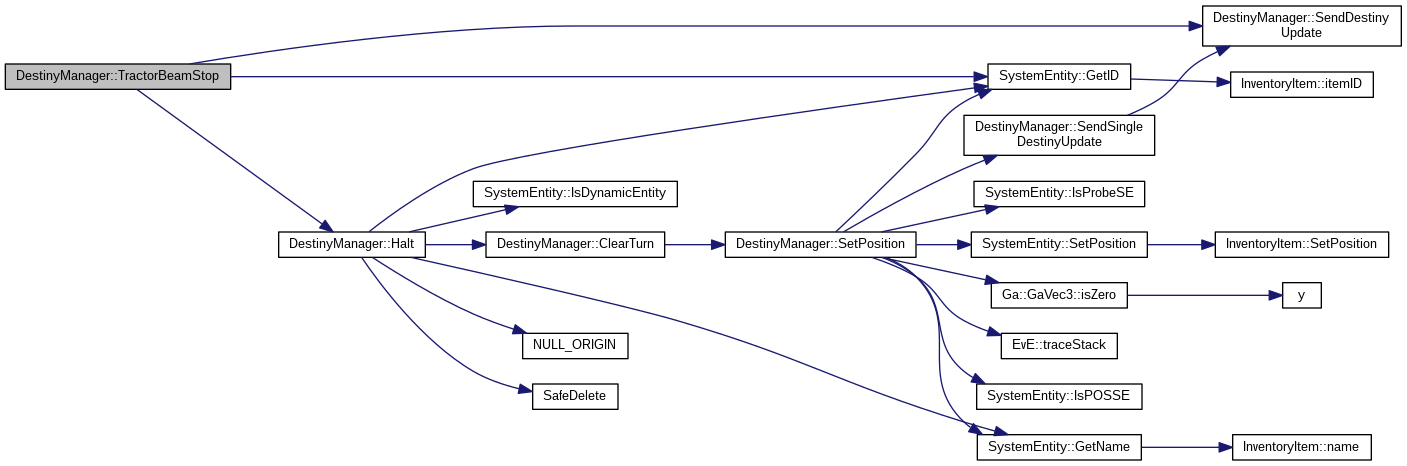
| void | TractorBeamStop () |
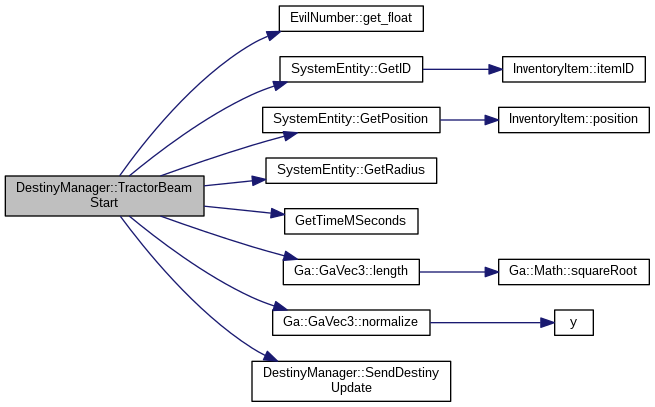
| void | TractorBeamStart (SystemEntity *pShipSE, EvilNumber speed) |
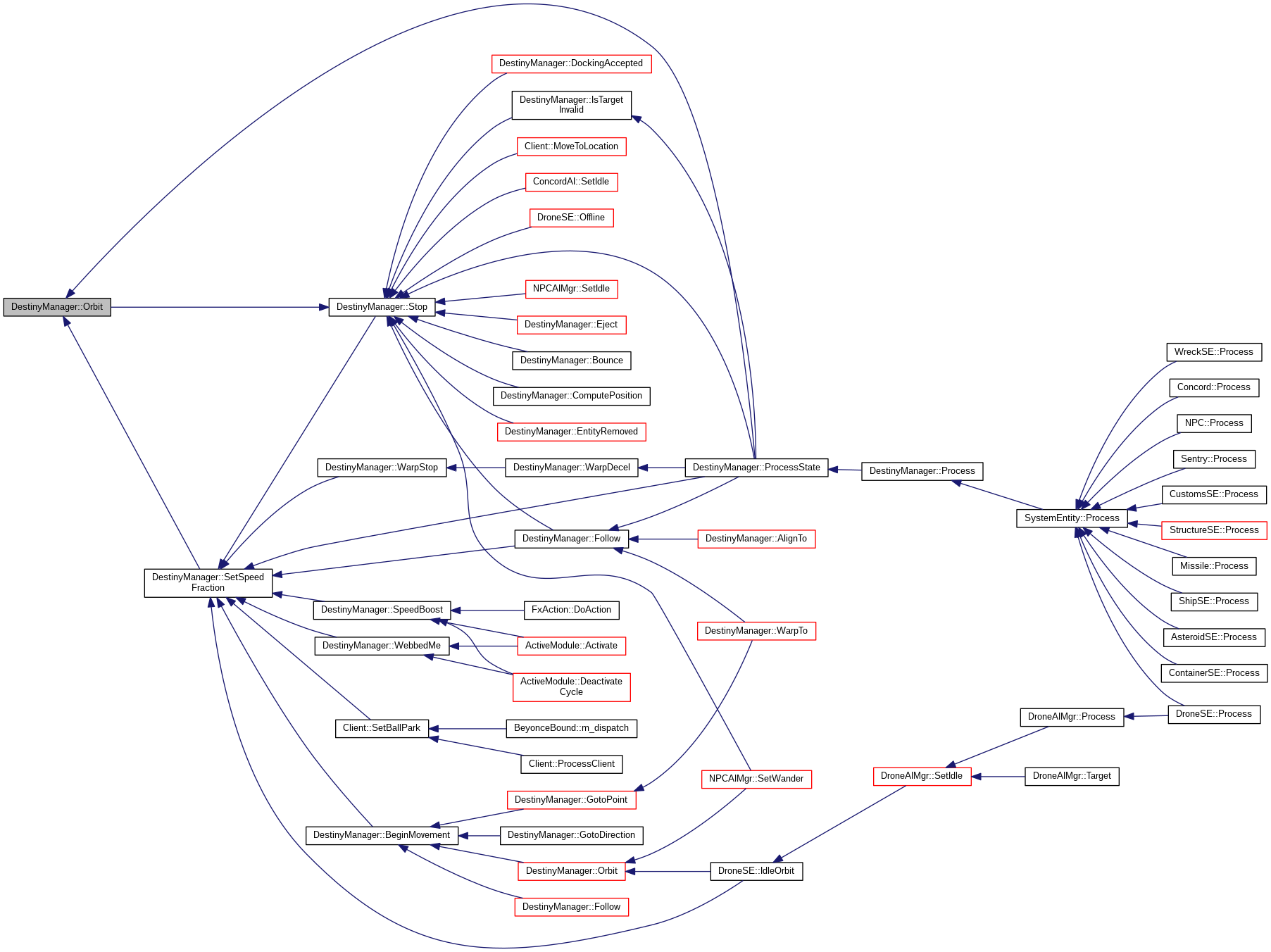
| void | Orbit (SystemEntity *pSE, uint32 distance=0) |
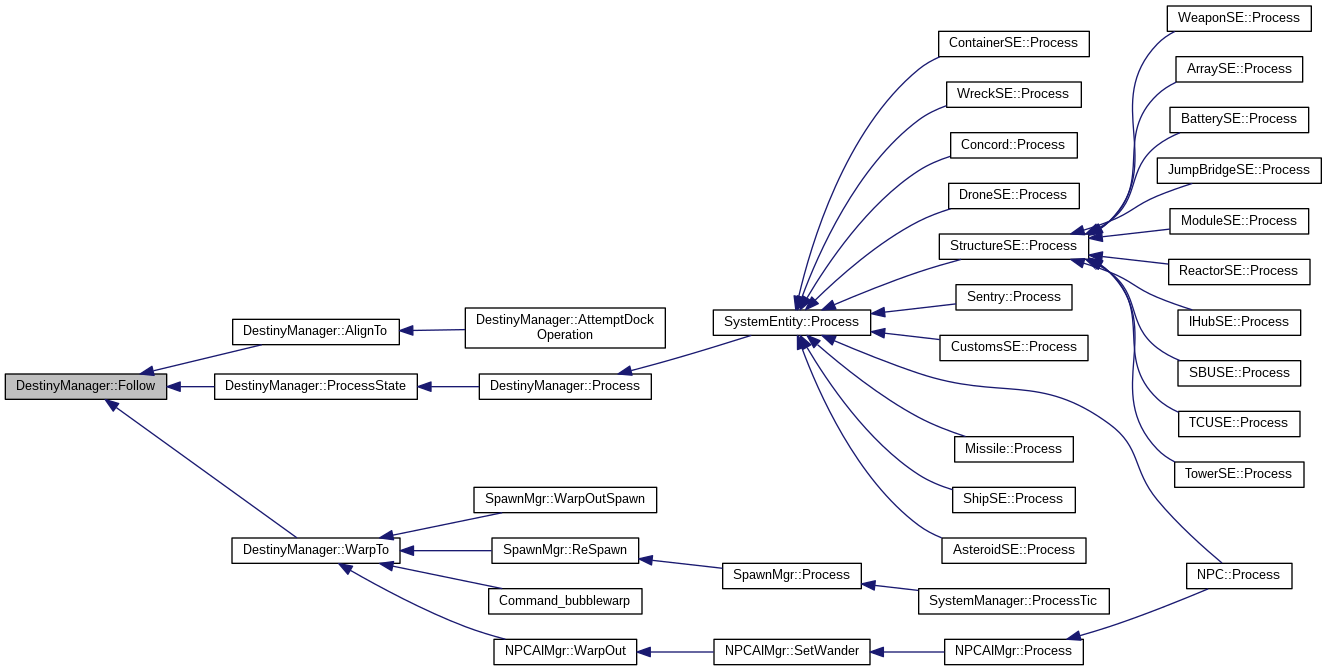
| void | Follow (SystemEntity *pSE, uint32 distance) |
| void | AlignTo (SystemEntity *pSE) |
| void | GotoPoint (const GPoint &point) |
| void | GotoDirection (const GPoint &direction) |
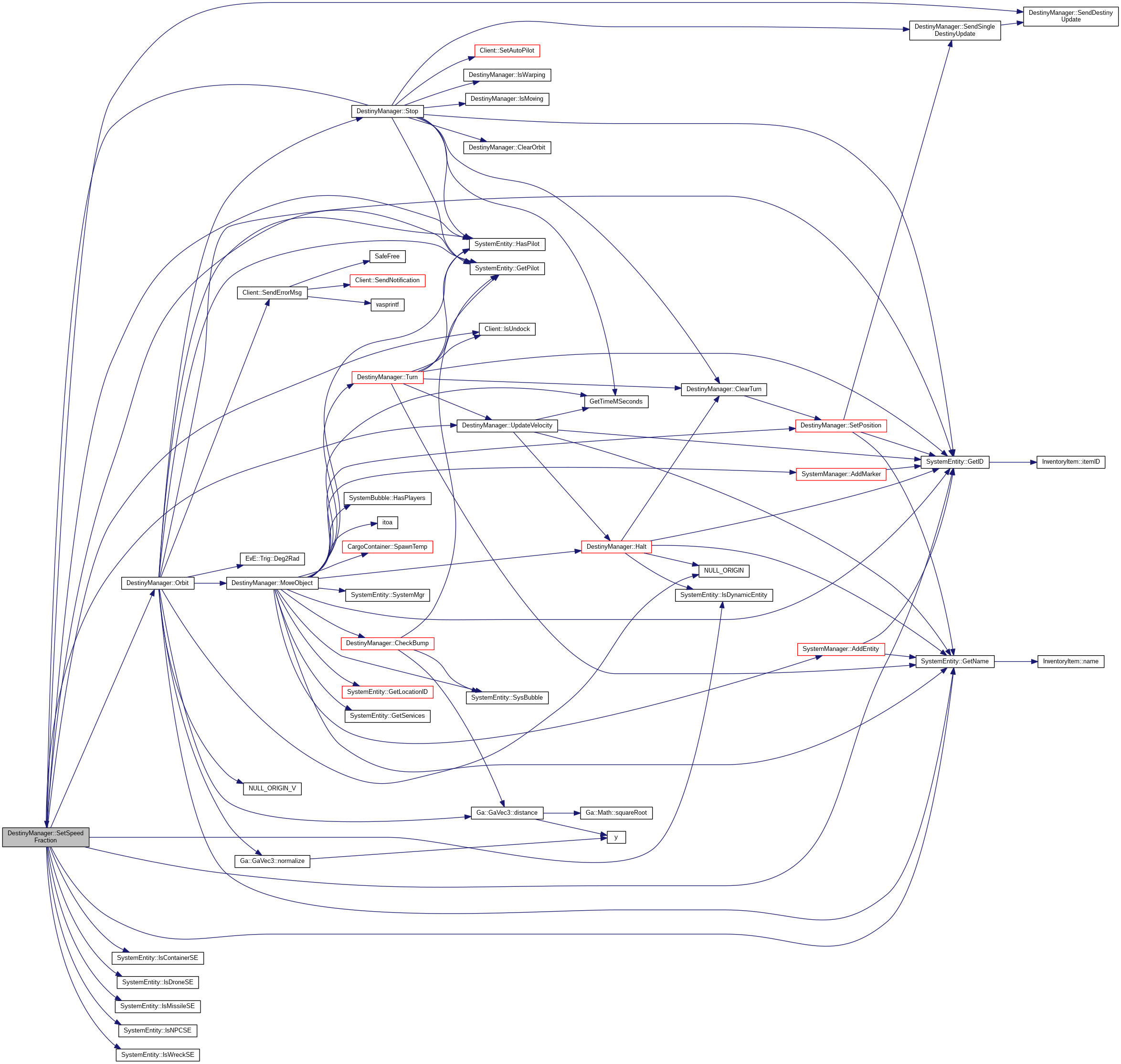
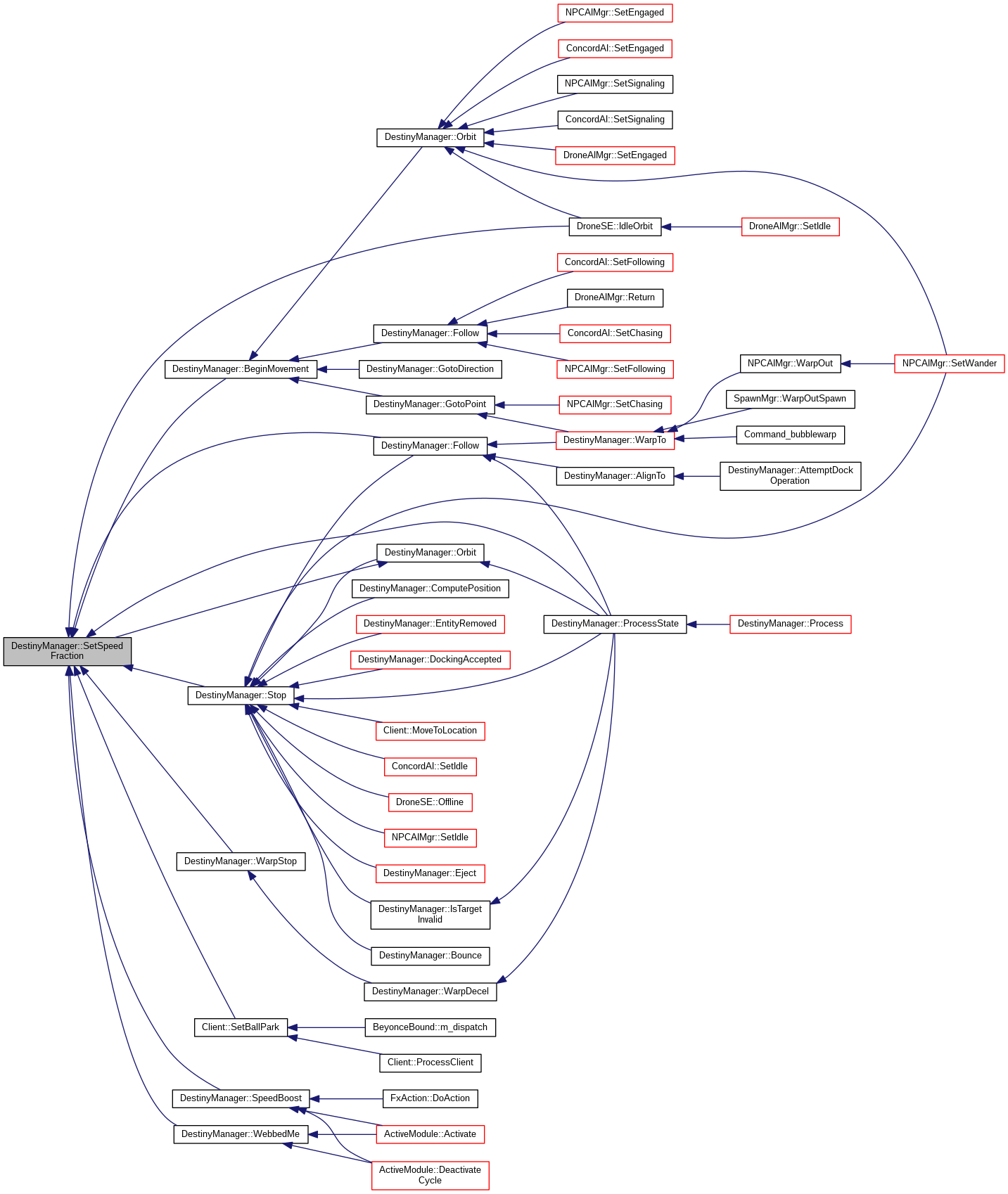
| void | SetSpeedFraction (float fraction=1.0f, bool startMovement=false) |
| void | WarpTo (const GPoint &where, int32 distance=0, bool autoPilot=false, SystemEntity *pSE=nullptr) |
| bool | IsMoving () |
| bool | IsAligned (GPoint &targetPoint) |
| bool | IsGoto () |
| bool | IsStopped () |
| bool | IsOrbiting () |
| bool | IsFollowing () |
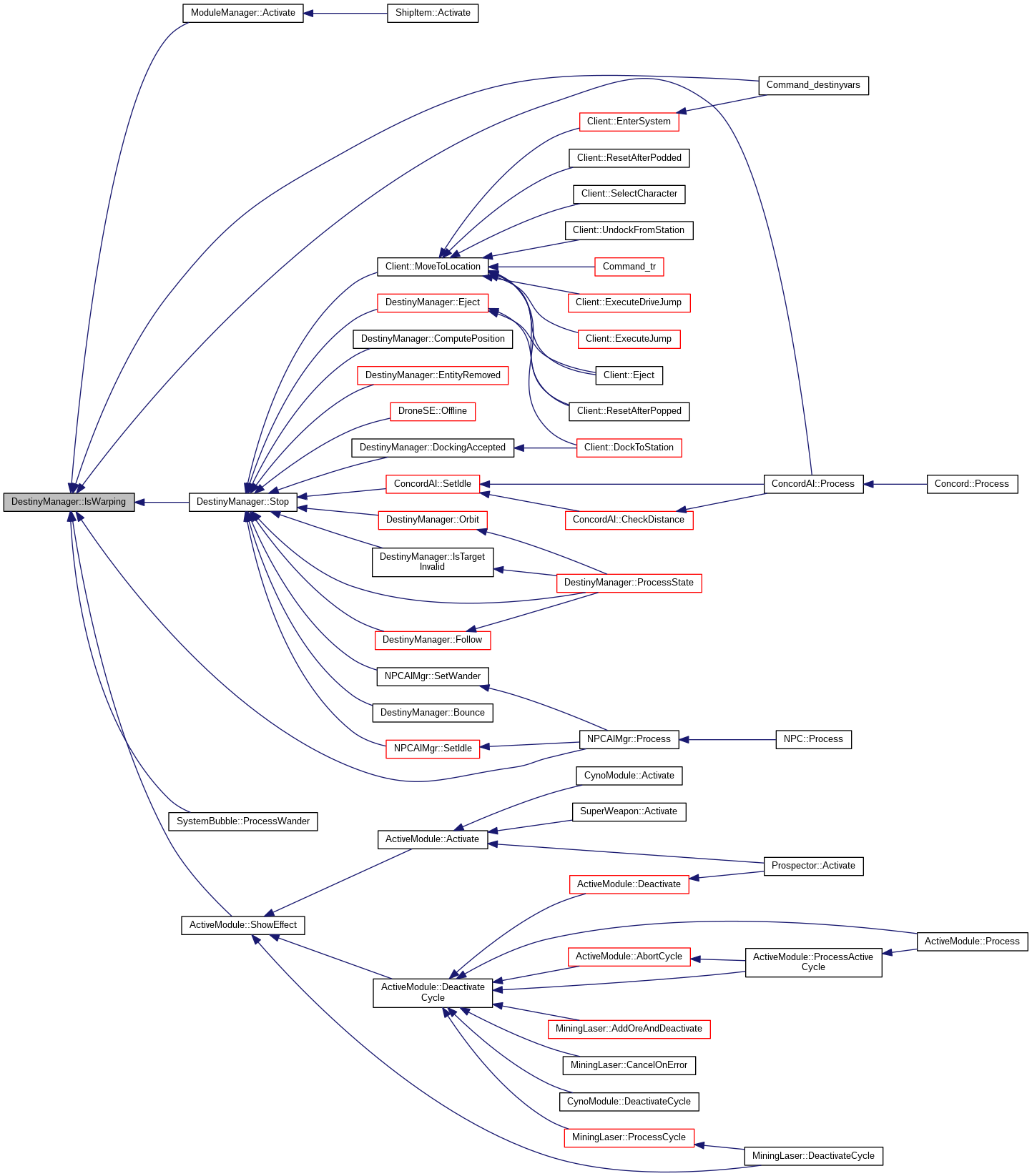
| bool | IsWarping () |
| bool | IsCloaked () |
| bool | IsTurning () |
| bool | IsTractored () |
| void | Jump (bool showCloak=true) |
| void | Cloak () |
| void | UnCloak () |
| PyResult | AttemptDockOperation () |
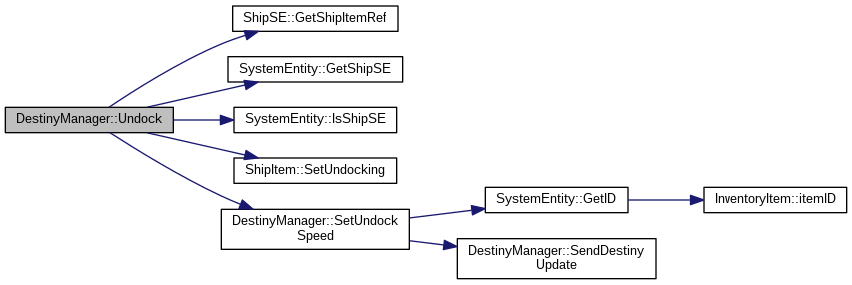
| void | Undock (GPoint dir) |
| void | SetUndockSpeed () |
| void | DockingAccepted () |
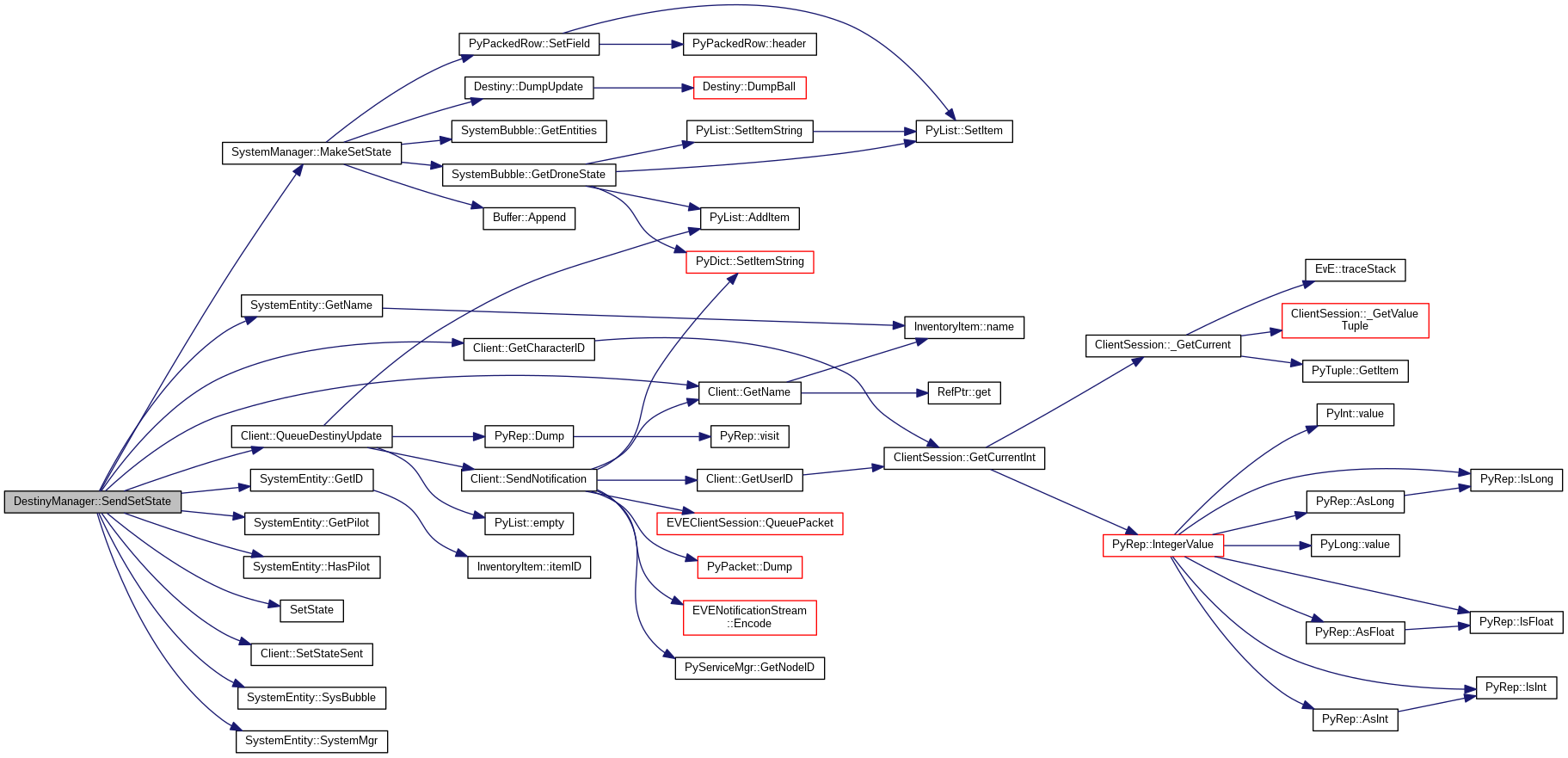
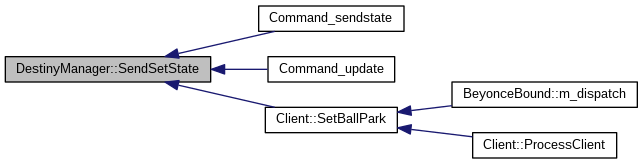
| void | SendSetState () const |
| void | SendJumpOut (uint32 gateID) const |
| void | SendGateActivity (uint32 gateID) const |
| void | SendJumpInEffect (std::string JumpEffect) const |
| void | SendJumpOutEffect (std::string JumpEffect, uint32 locationID) const |
| void | SendTerminalExplosion (uint32 shipID, uint32 bubbleID, bool isGlobal=false) const |
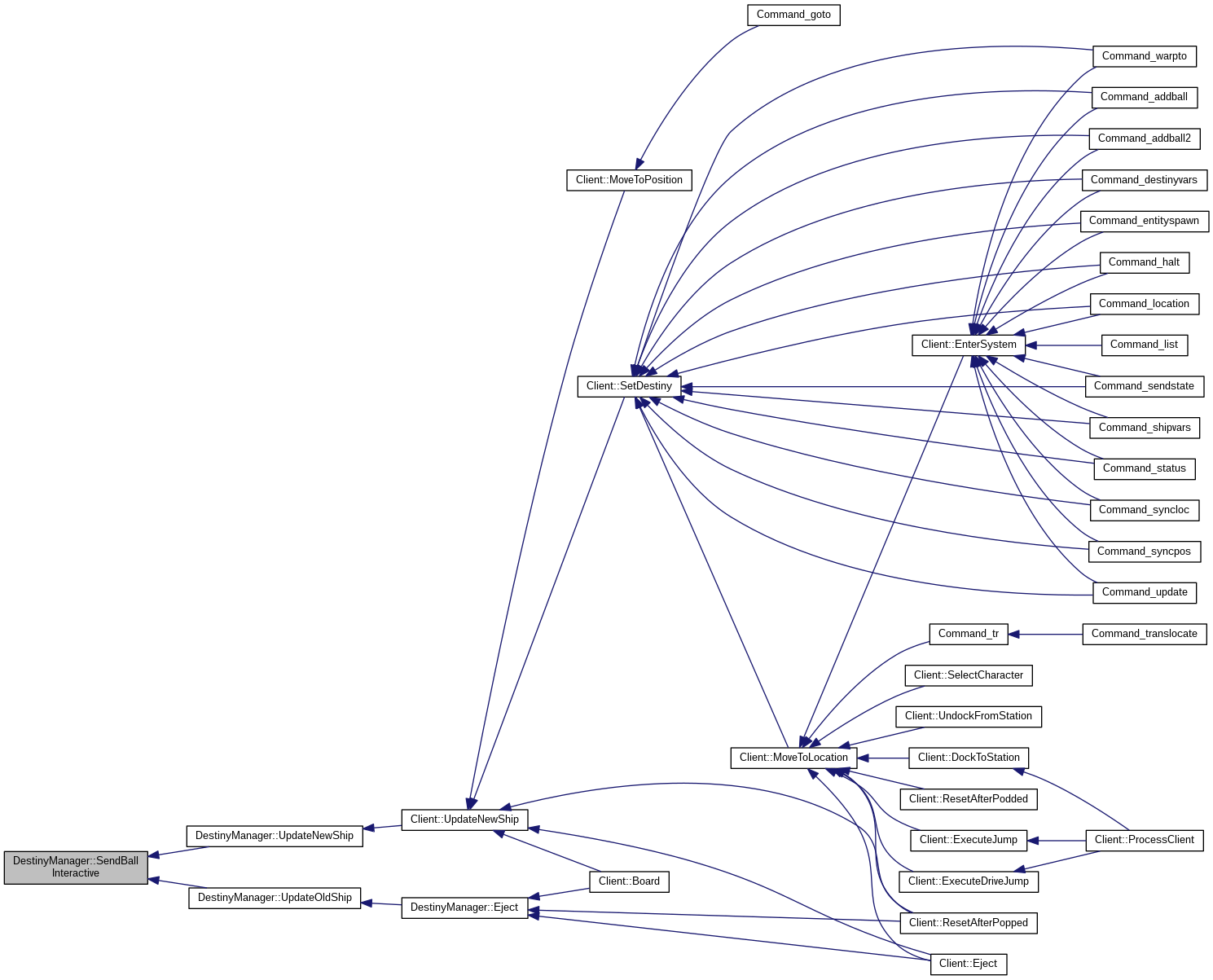
| void | SendBallInteractive (const ShipItemRef shipRef, bool set=false) const |
| void | UpdateNewShip (const ShipItemRef newShipRef) |
| void | UpdateOldShip (ShipSE *pShipSE) |
| void | SendJettisonPacket () const |
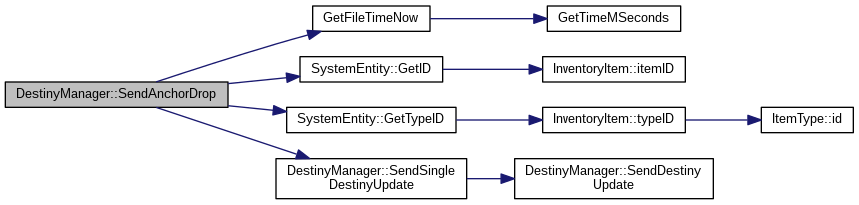
| void | SendAnchorDrop () const |
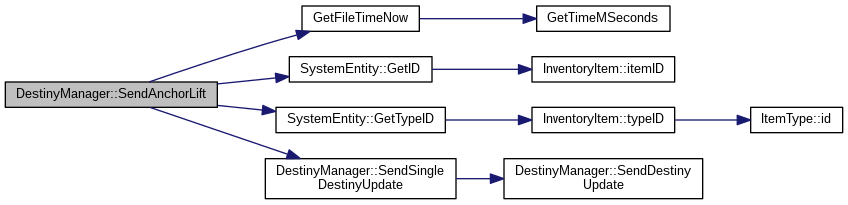
| void | SendAnchorLift () const |
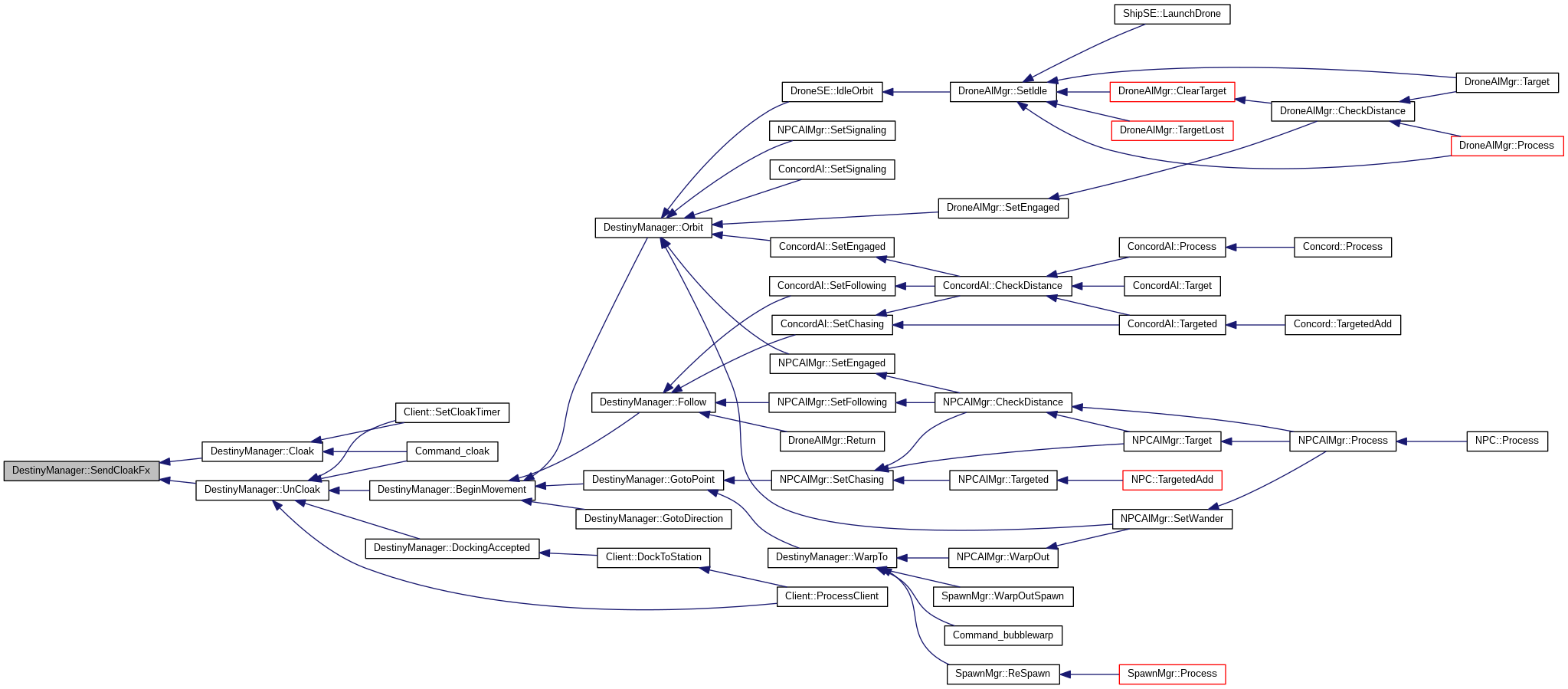
| void | SendCloakFx (bool apply=false, bool module=false) const |
| void | SendSpecialEffect10 (uint32 entityID, uint32 targetID, std::string guid, bool isOffensive, bool start, bool isActive) const |
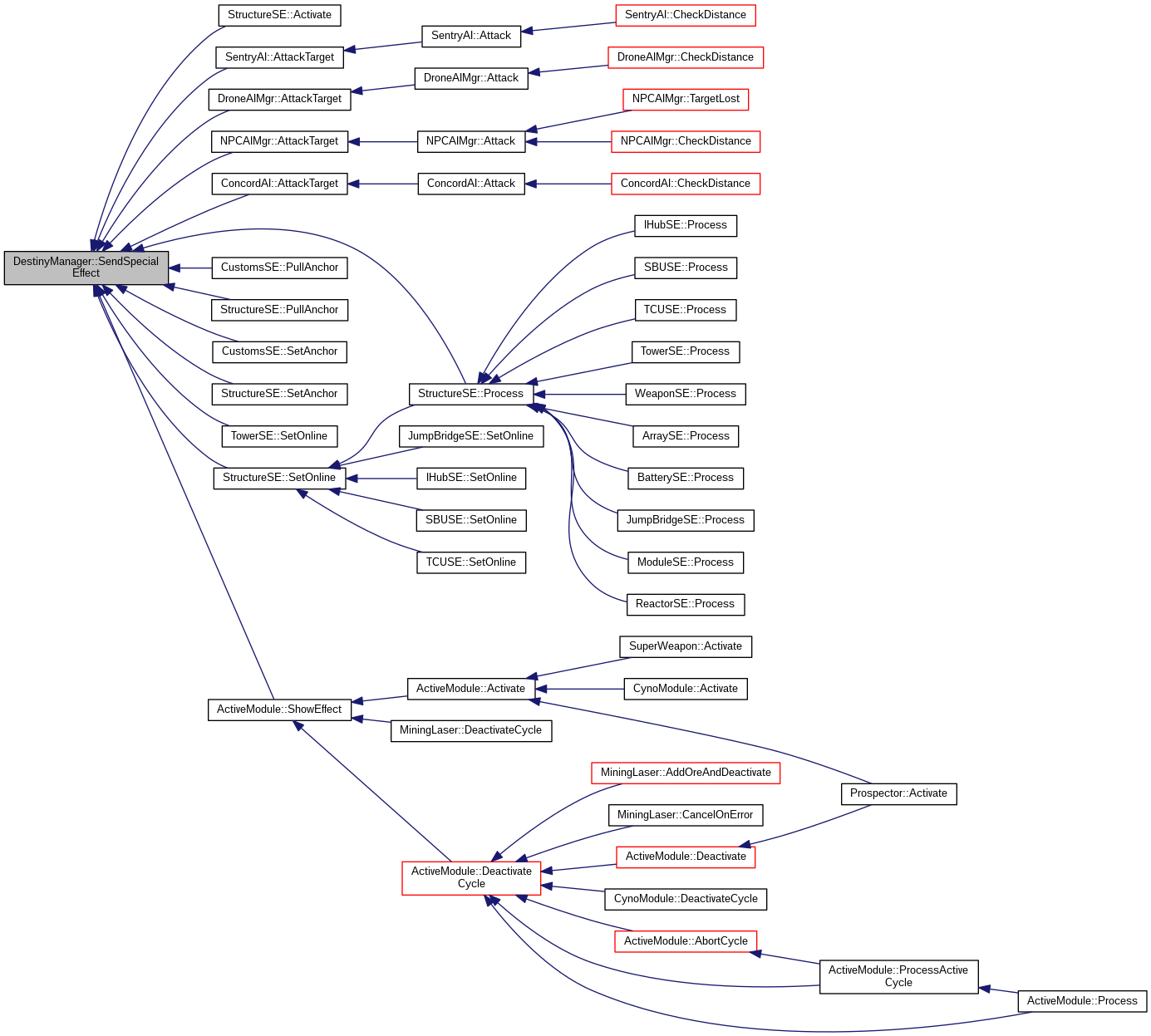
| void | SendSpecialEffect (uint32 entityID, uint32 moduleID, uint32 moduleTypeID, uint32 targetID, uint32 chargeTypeID, std::string guid, bool isOffensive, bool start, bool isActive, int32 duration, uint32 repeat, int32 graphicInfo=0) const |
| int32 | GetDistance () |
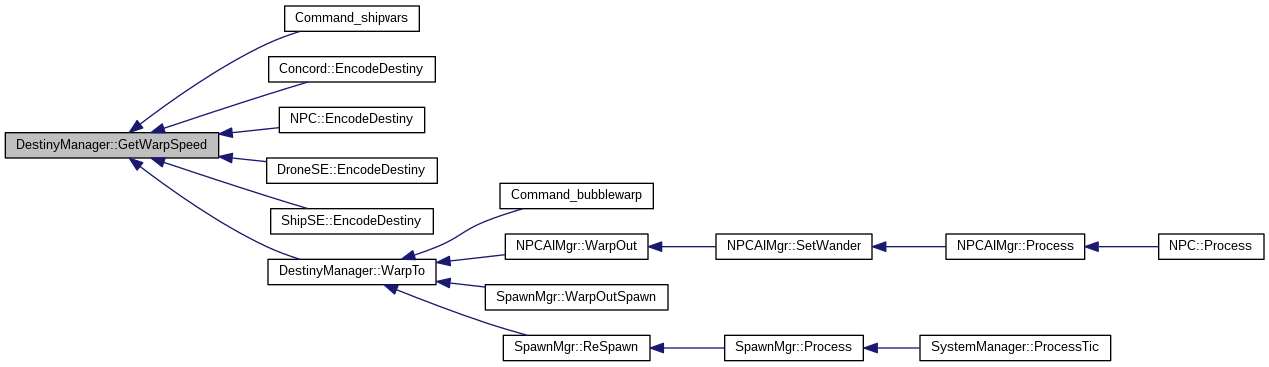
| int32 | GetWarpSpeed () |
| uint32 | GetTargetID () |
| SystemEntity * | GetTargetEntity () |
| GPoint | GetTargetPoint () |
| double | GetMaxVelocity () |
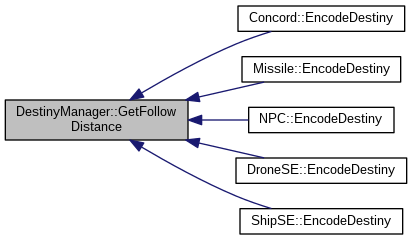
| double | GetFollowDistance () |
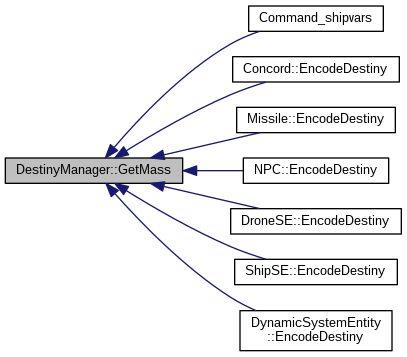
| double | GetMass () |
| double | GetAgility () |
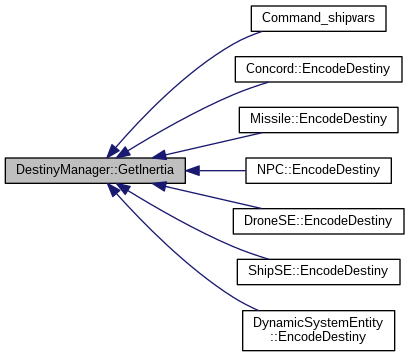
| double | GetInertia () |
| uint32 | GetStateStamp () |
| GVector | GetHeading () |
| float | GetAlignTime () |
| float | GetAccelTime () |
| float | GetWarpTime () |
| float | GetWarpDropSpeed () |
| double | GetRadius () |
| double | GetCapNeed () |
| float | GetRadTic () |
| void | MakeMissile (Missile *missile) |
| bool | IsFrozen () |
| void | SetFrozen (bool set=false) |
Protected Member Functions | |
| void | ProcessState () |
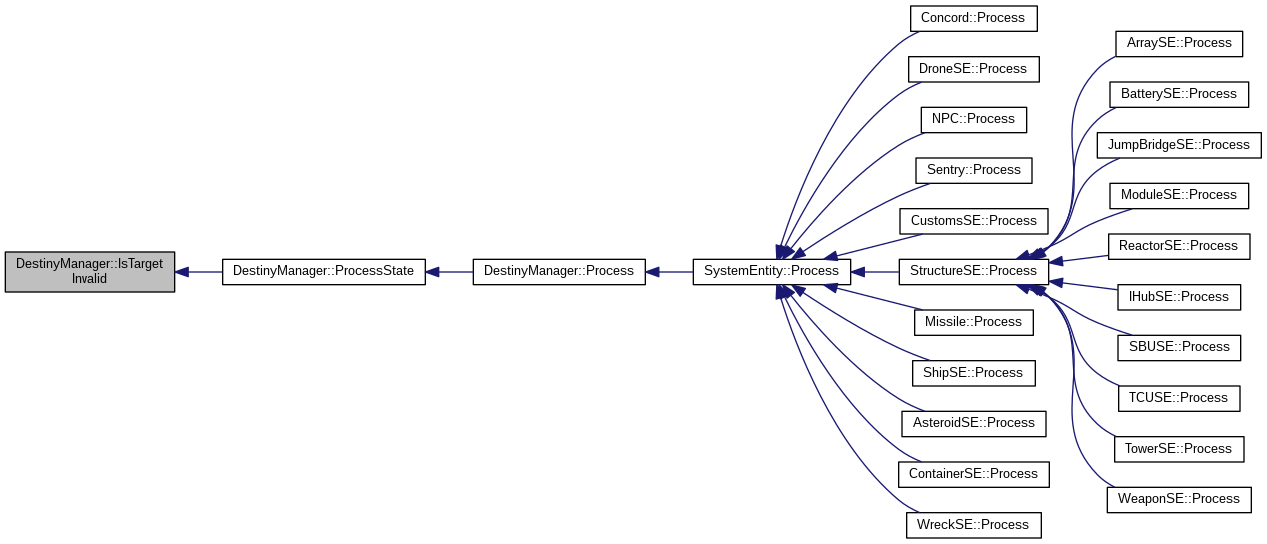
| bool | IsTargetInvalid () |
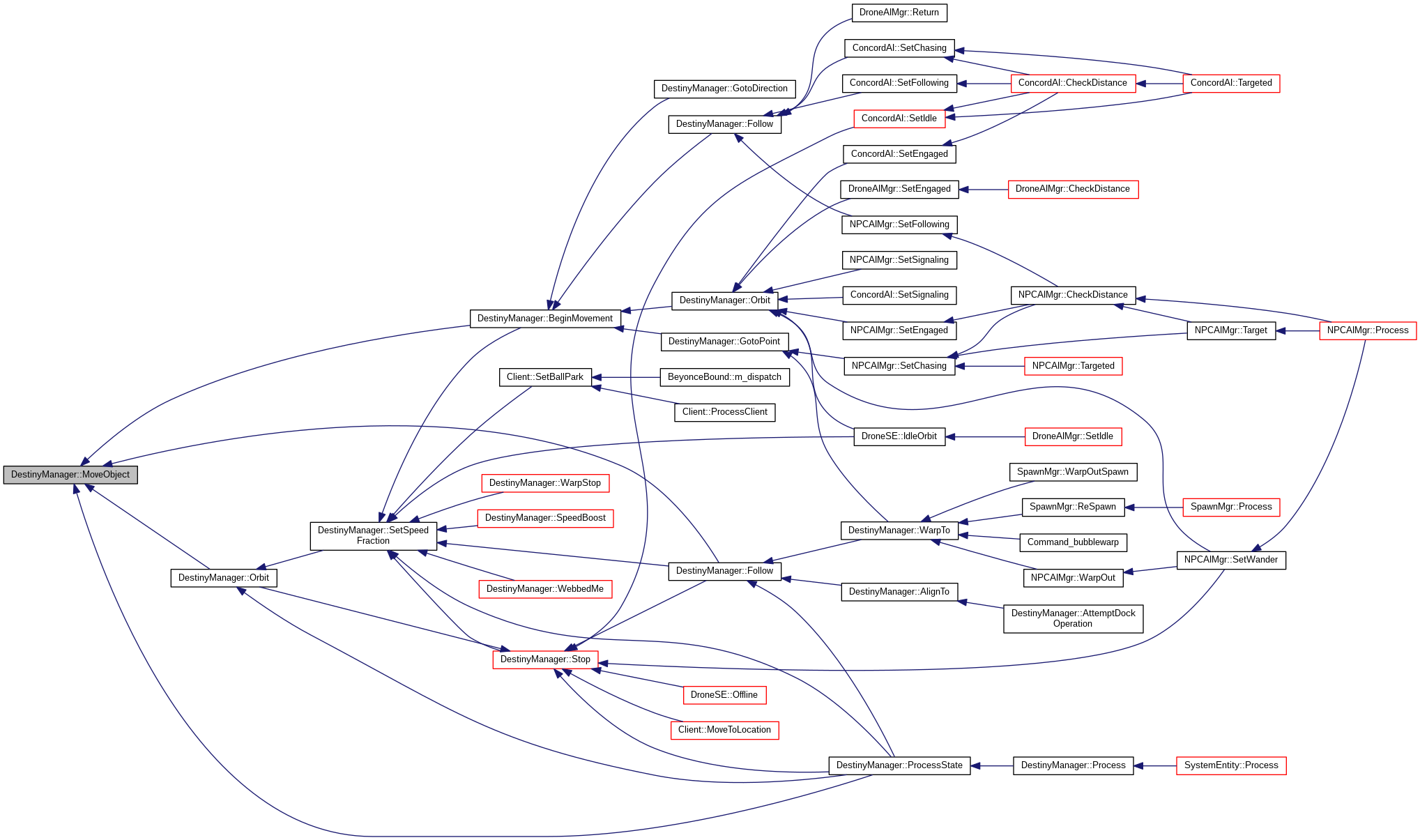
| void | MoveObject () |
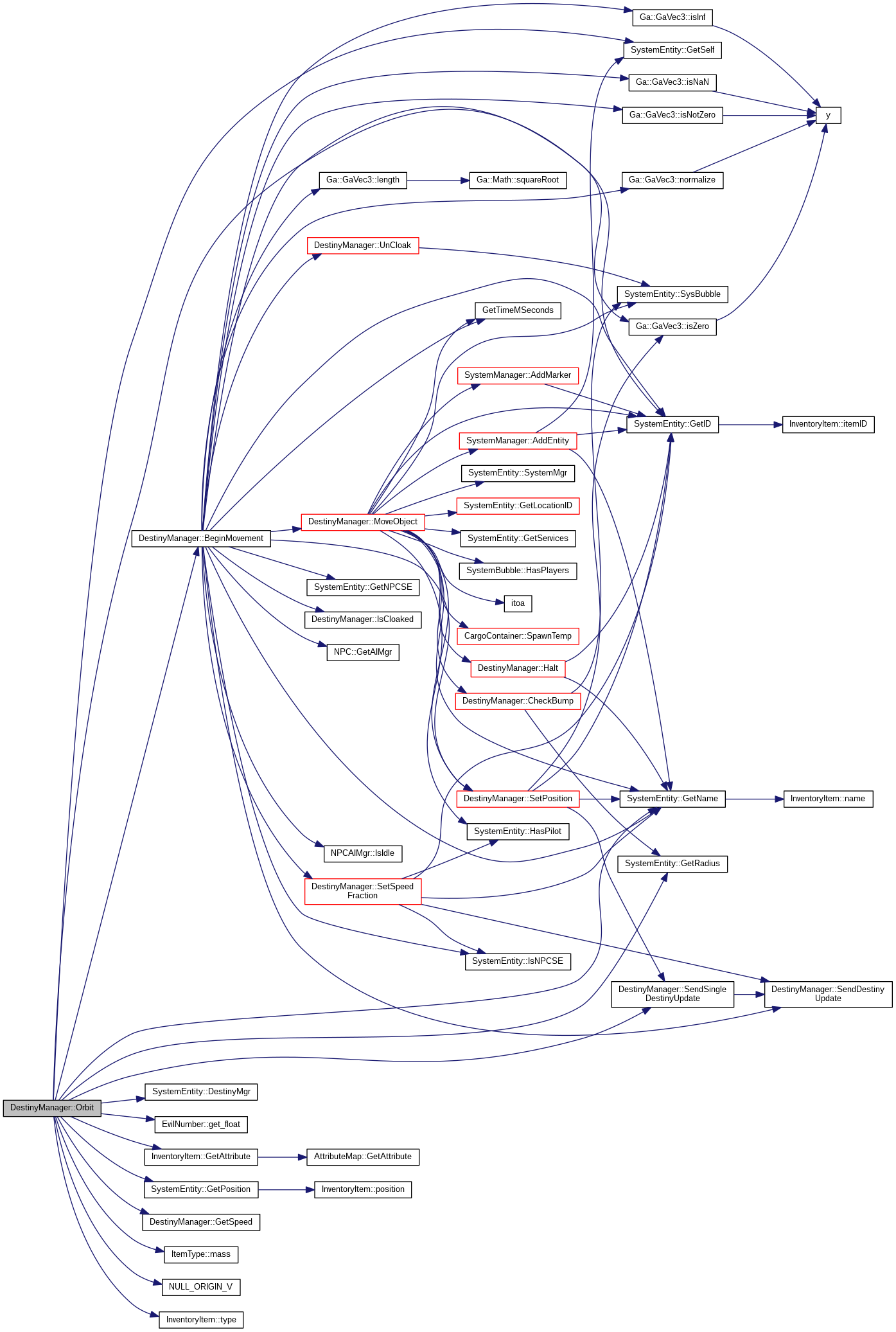
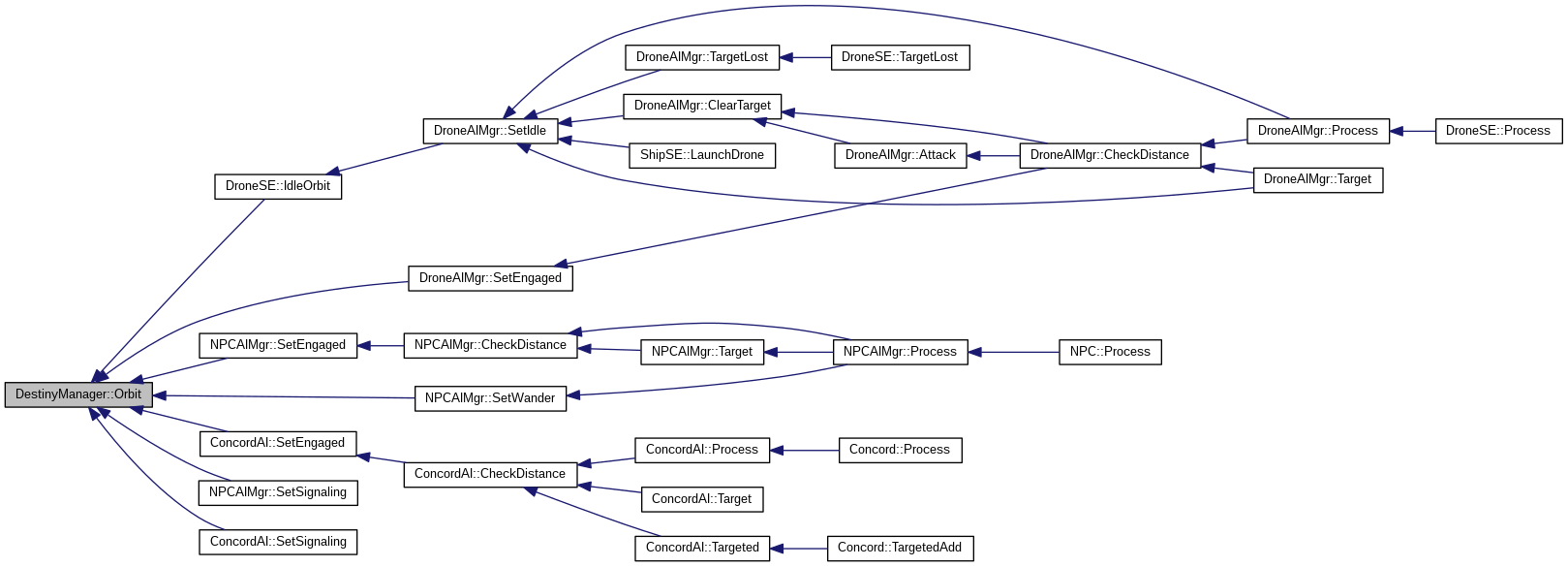
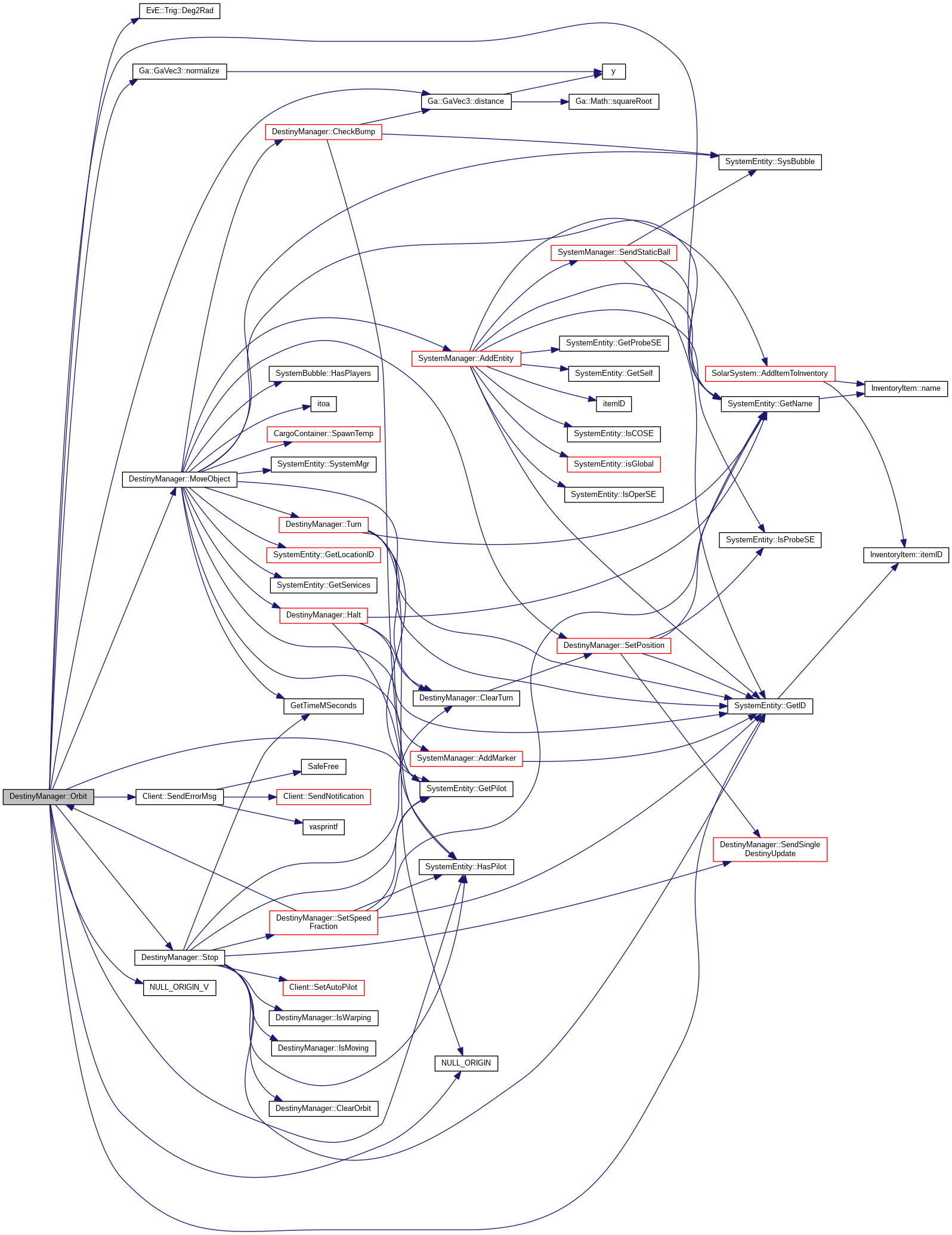
| void | Orbit () |
| void | Follow () |
| void | BeginMovement () |
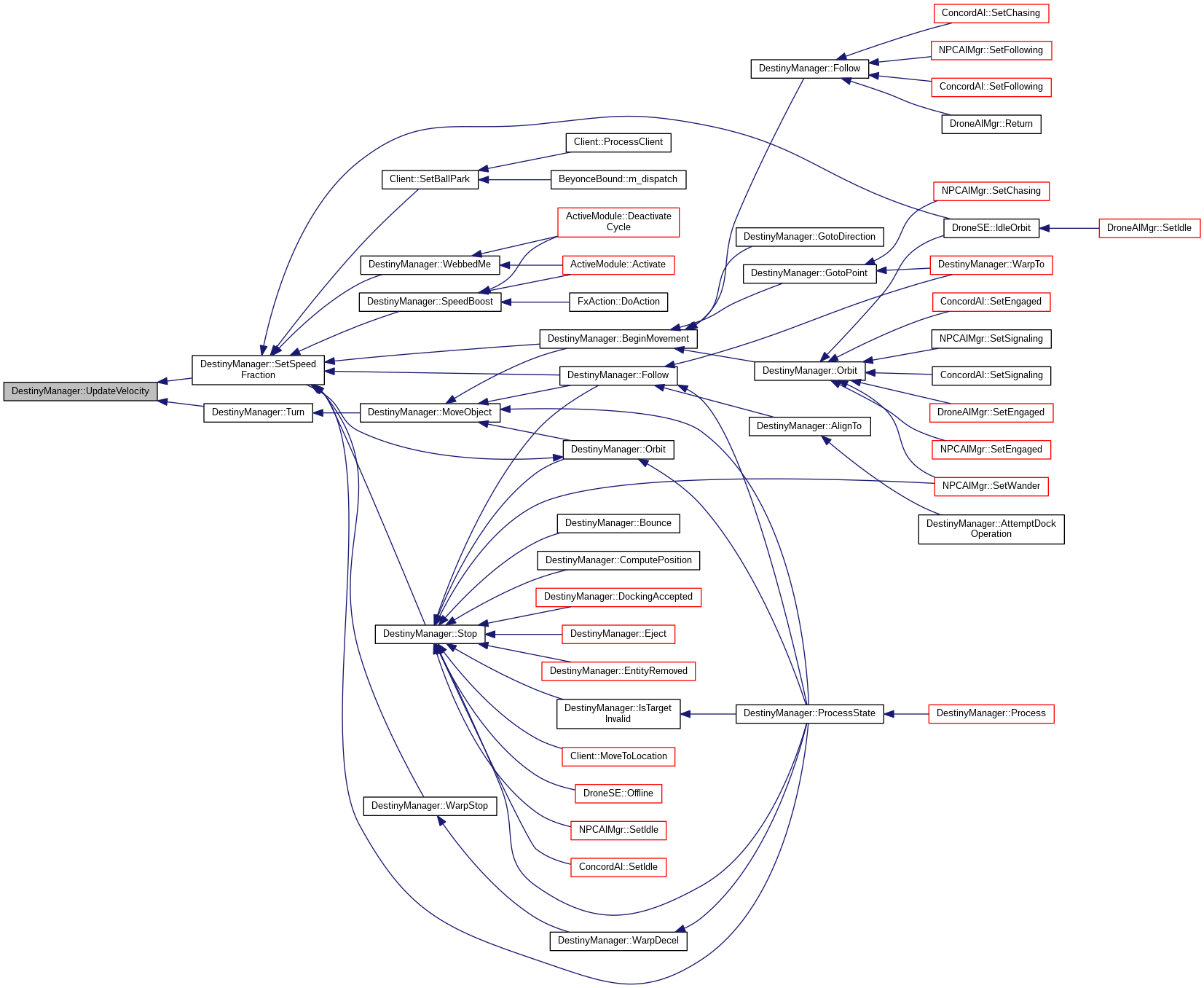
| void | UpdateVelocity (bool isMoving=false) |
Private Member Functions | |
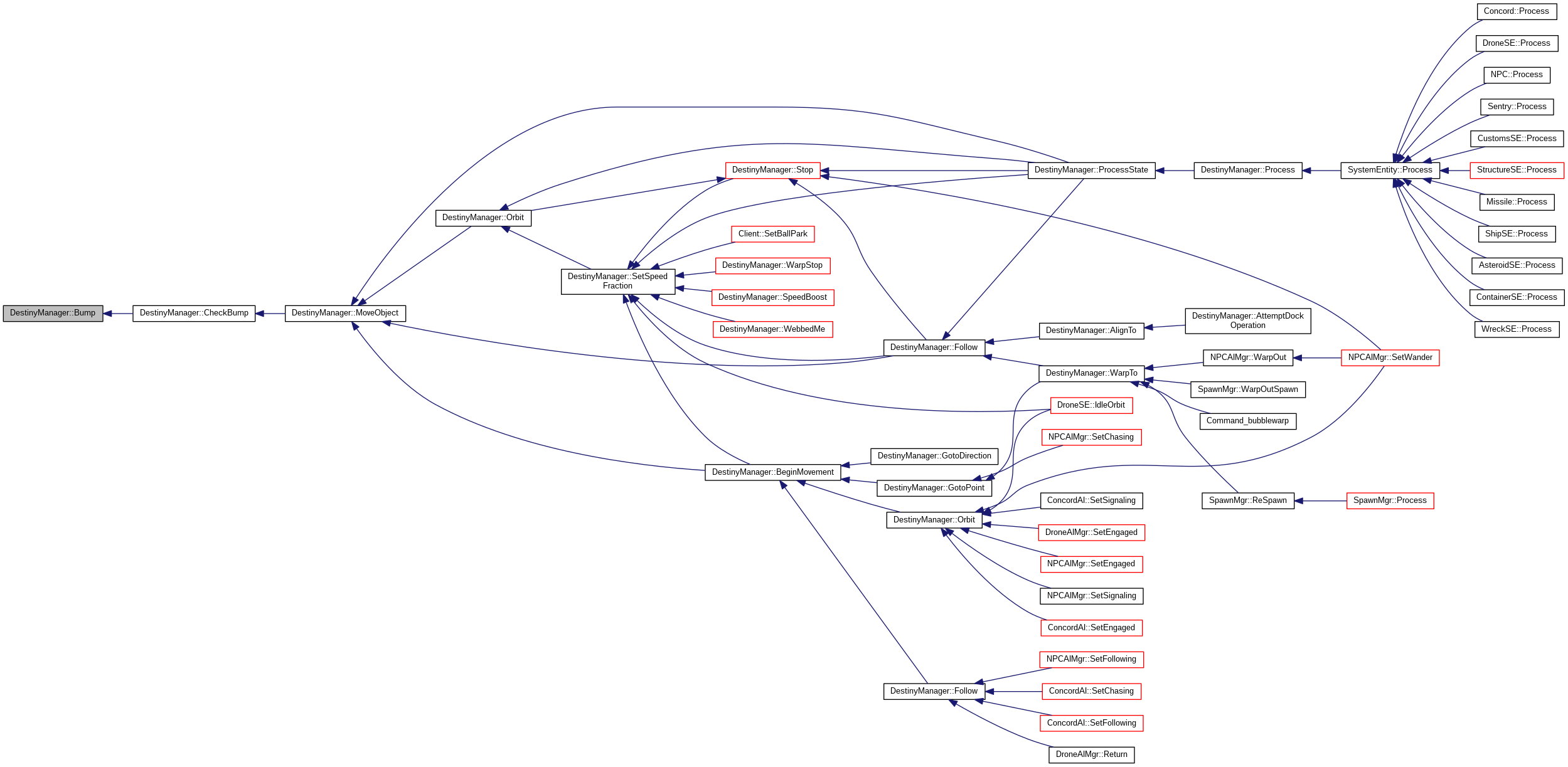
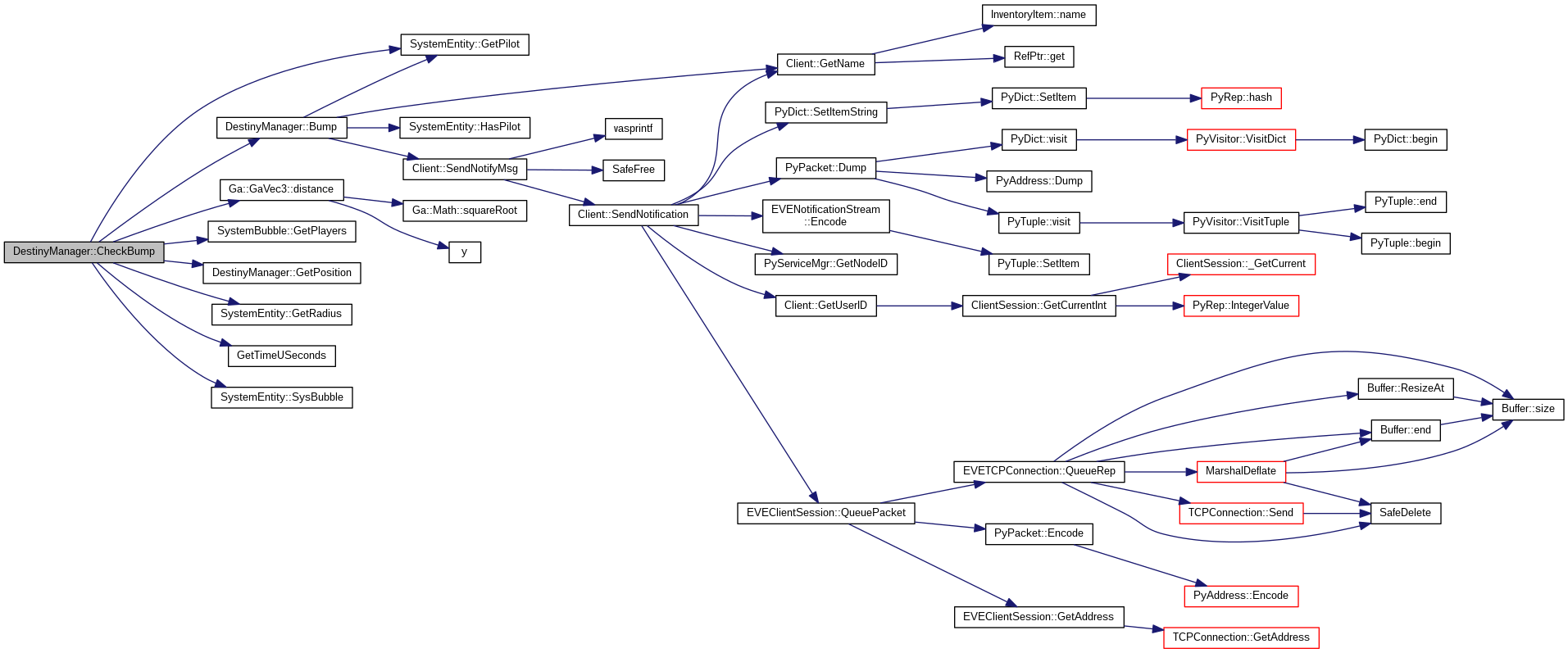
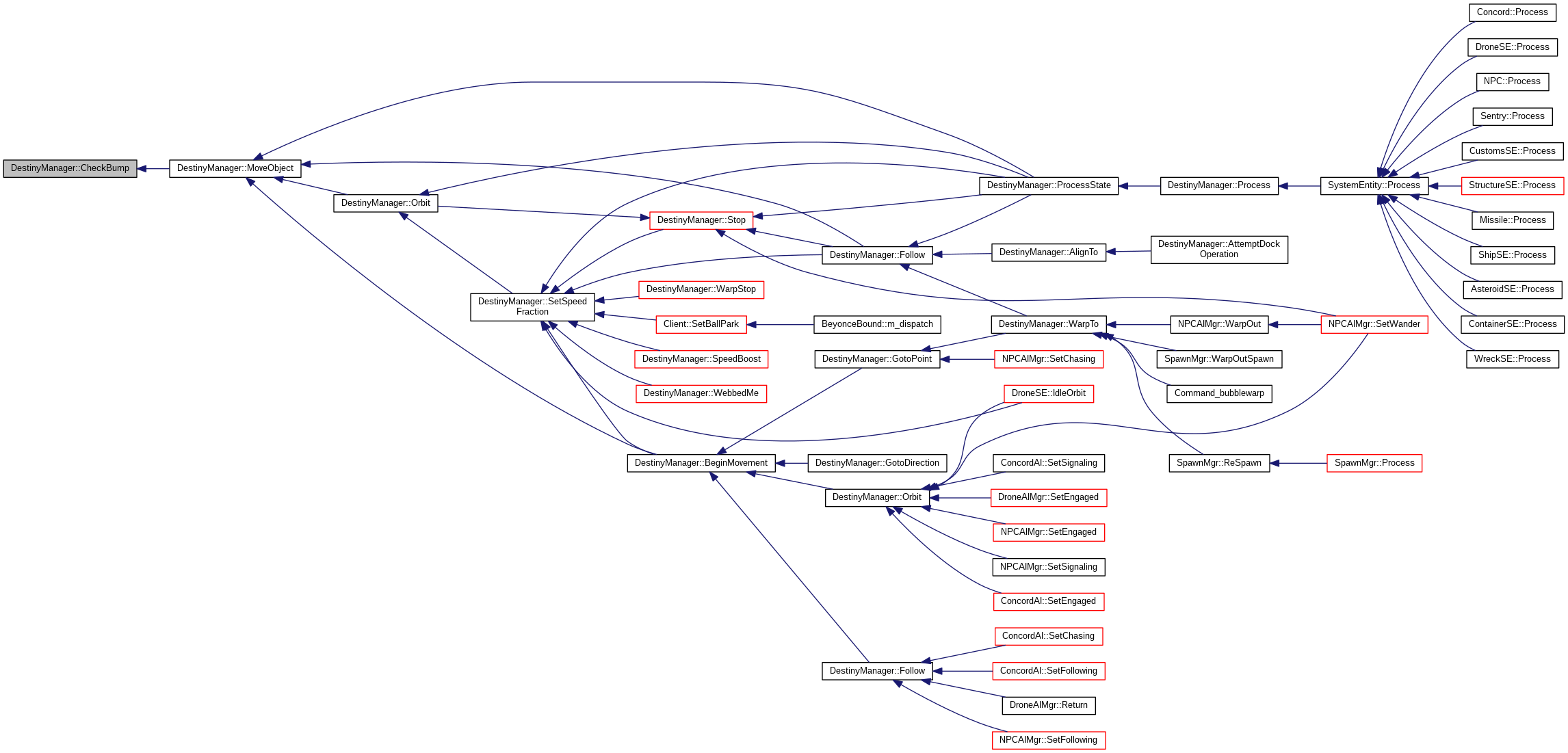
| void | CheckBump () |
| void | Bump (SystemEntity *who) |
| void | Bounce (GVector direction, float speed) |
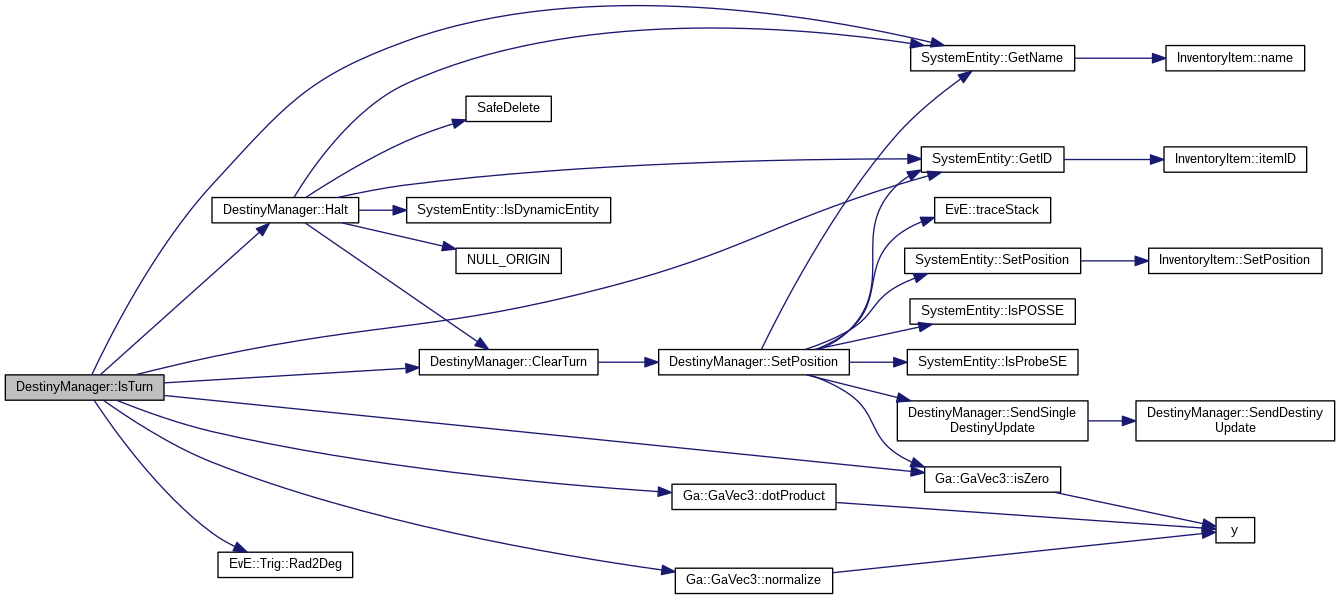
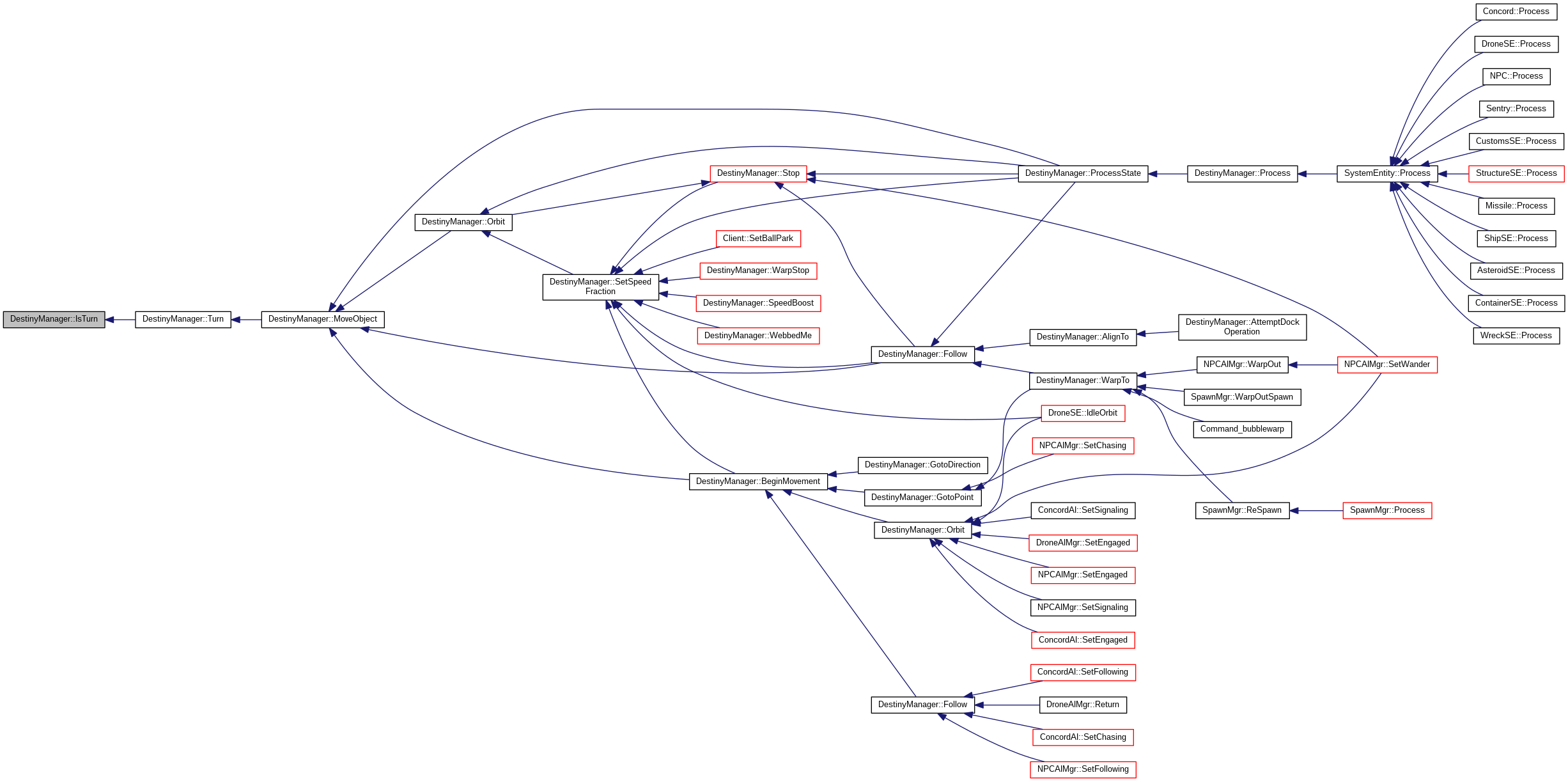
| bool | IsTurn () |
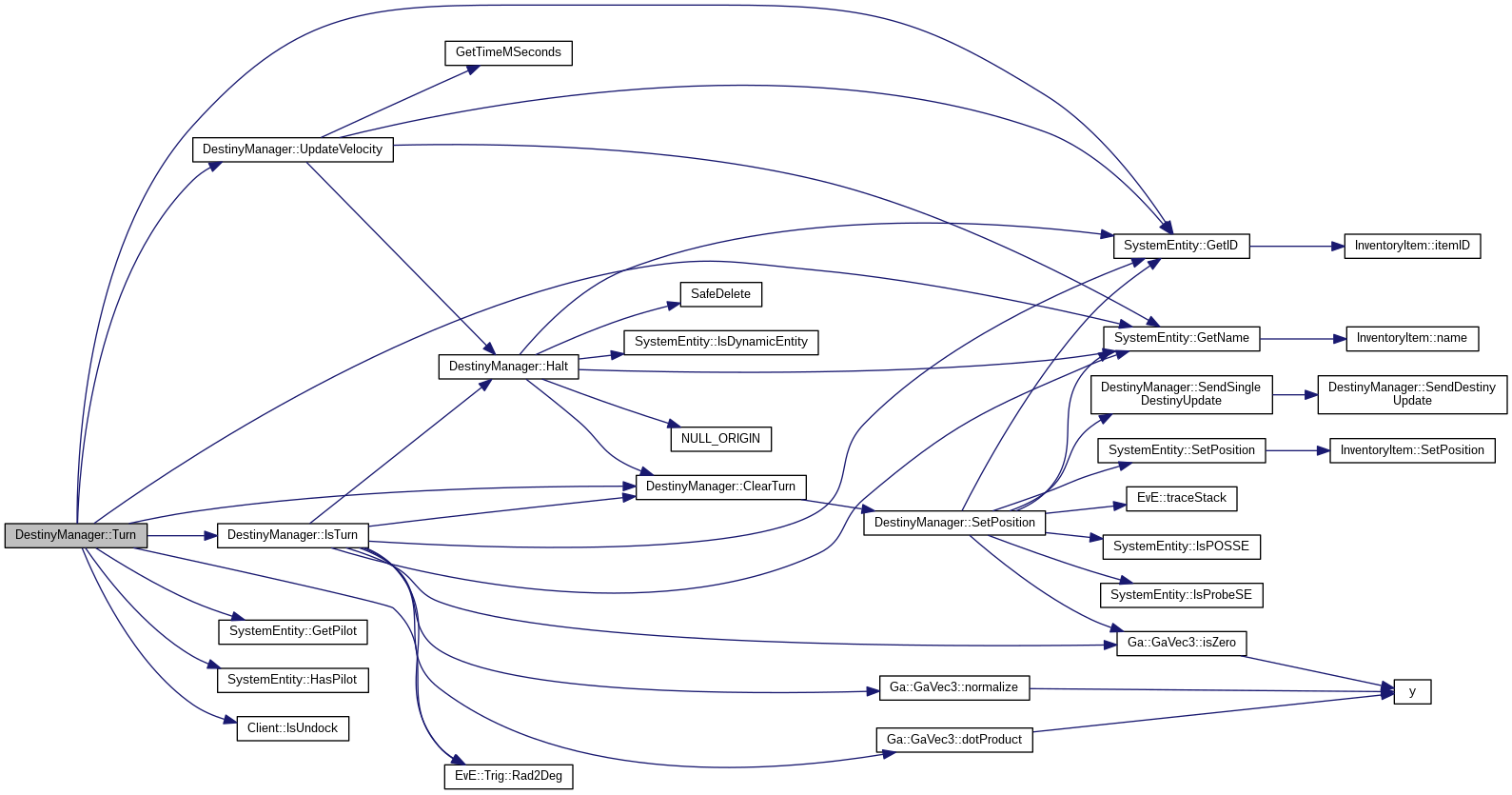
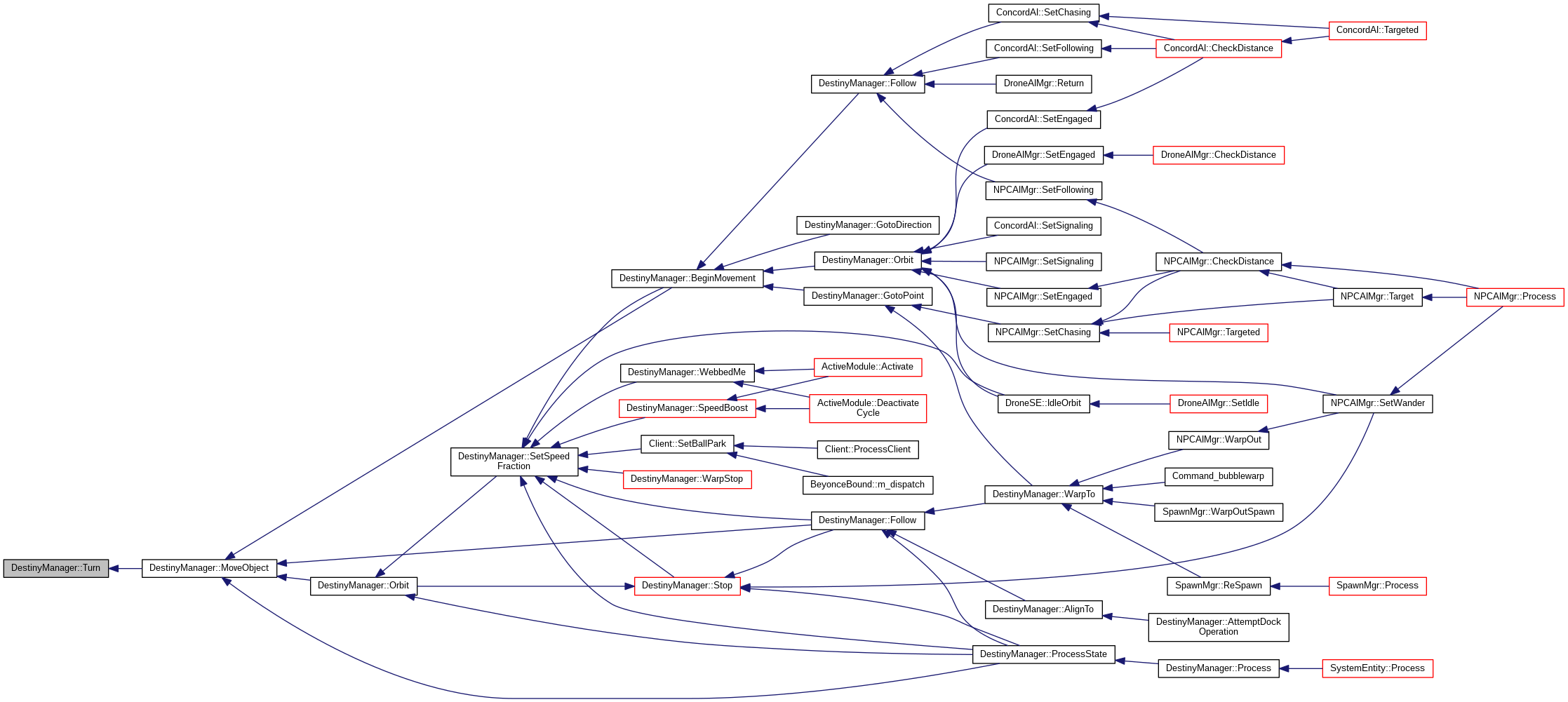
| void | Turn () |
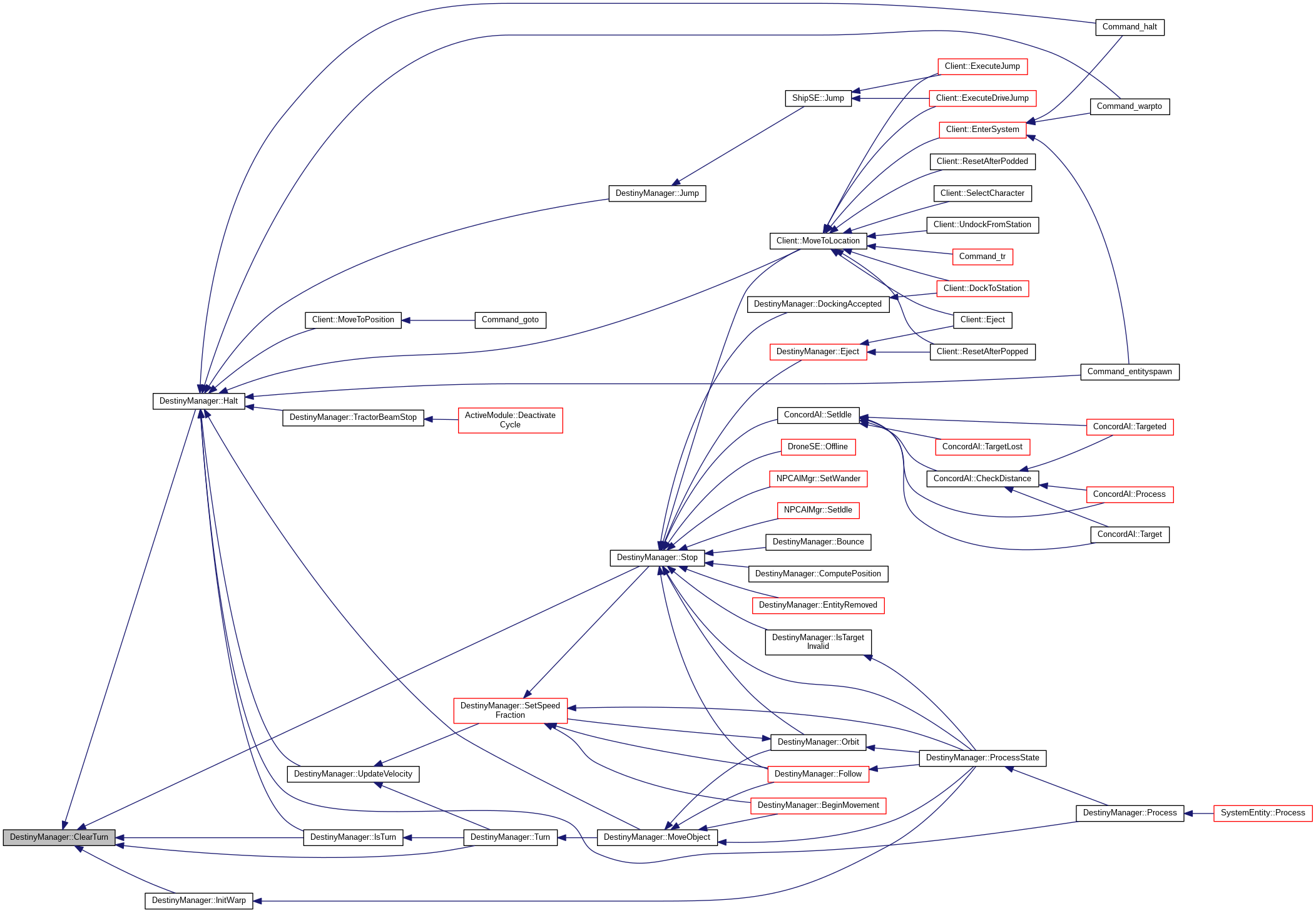
| void | ClearTurn () |
| GPoint | ComputePosition (double curRad) |
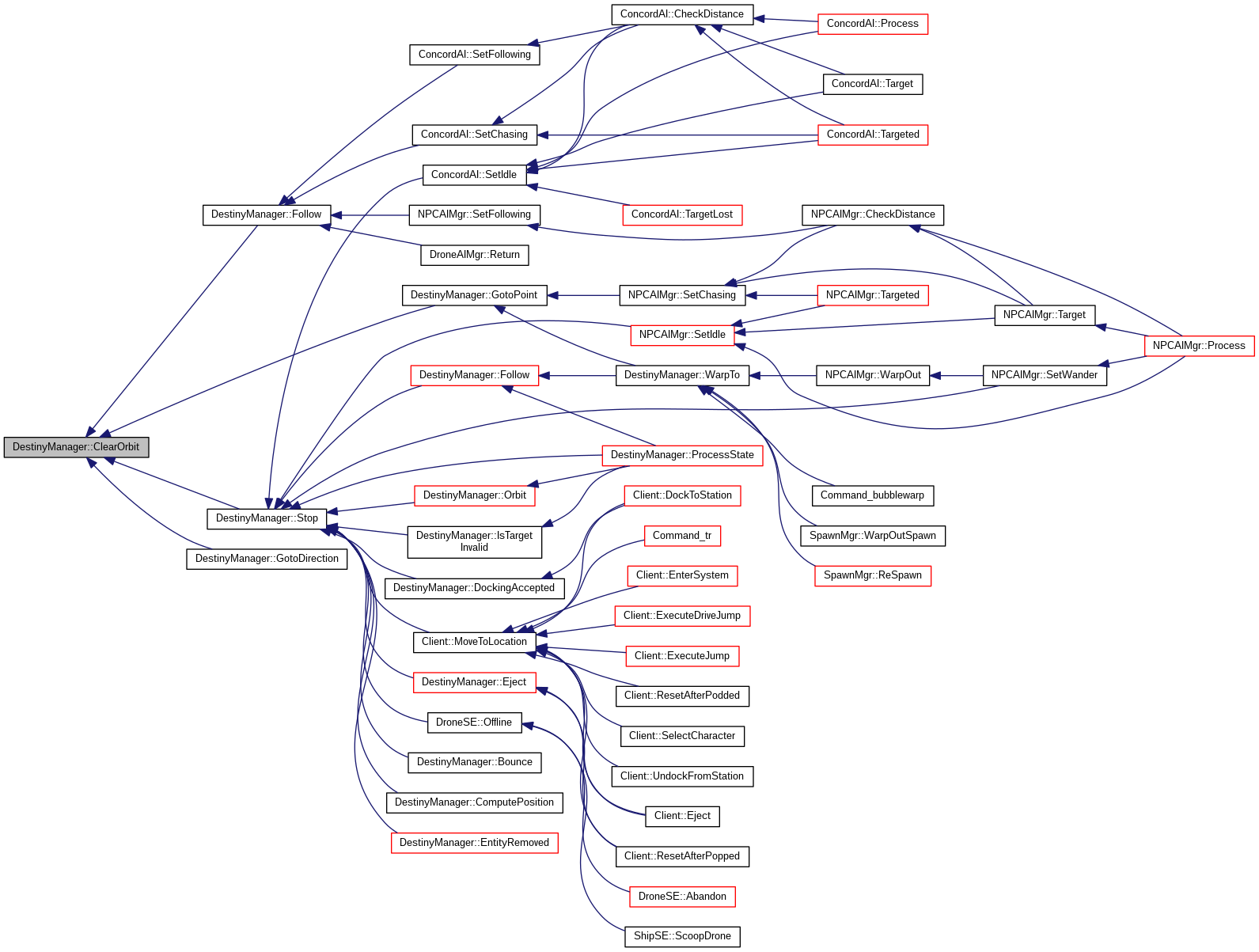
| void | ClearOrbit () |
| void | InitWarp () |
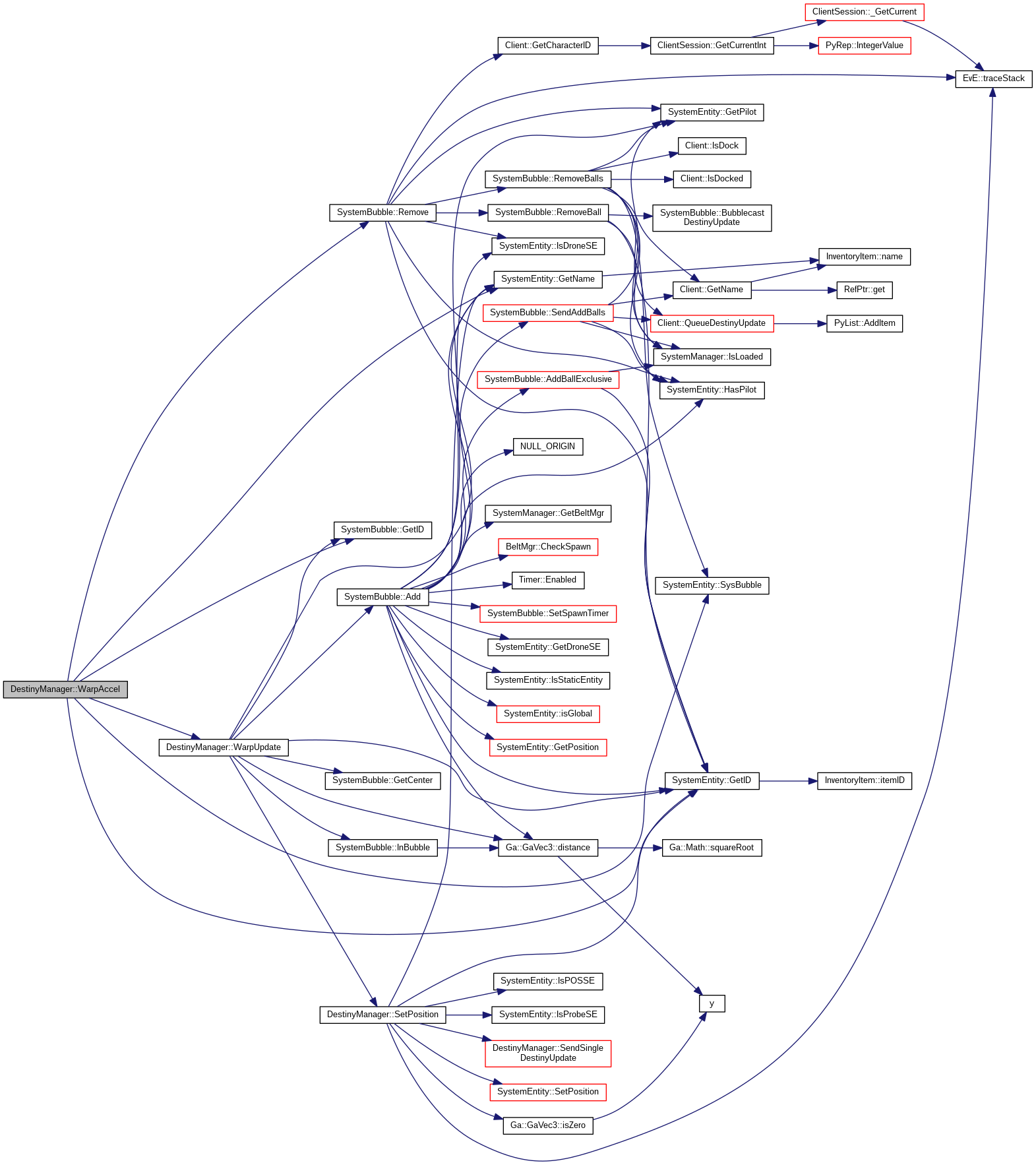
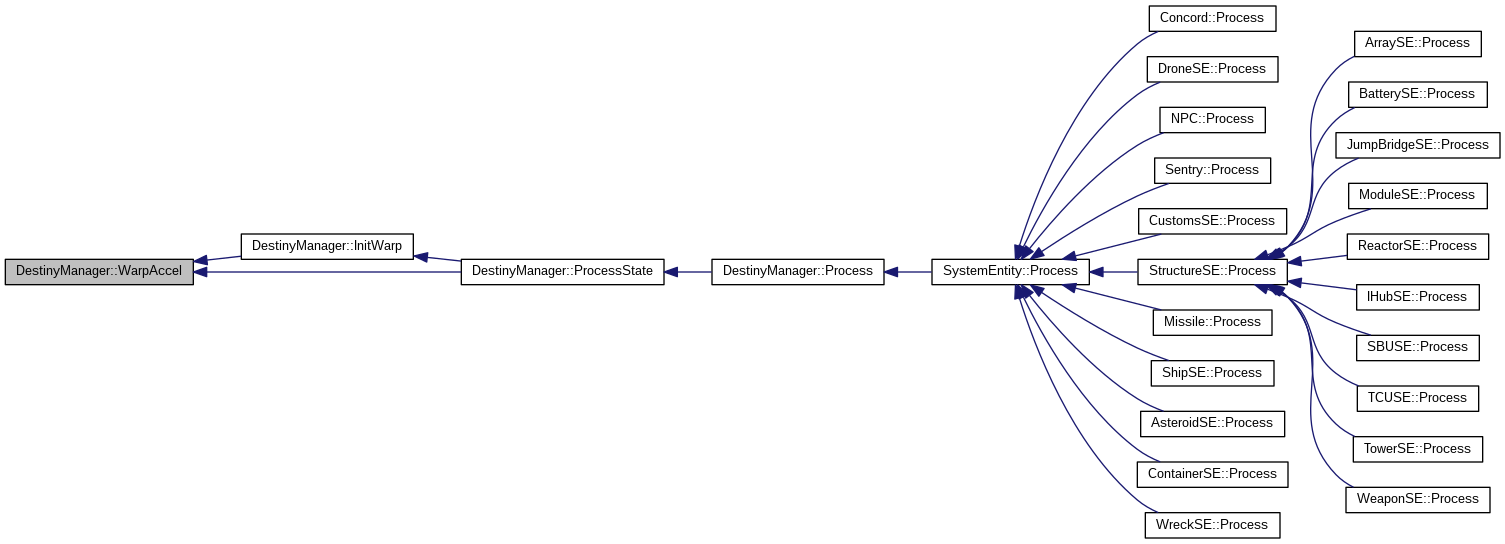
| void | WarpAccel (uint16 sec_into_warp) |
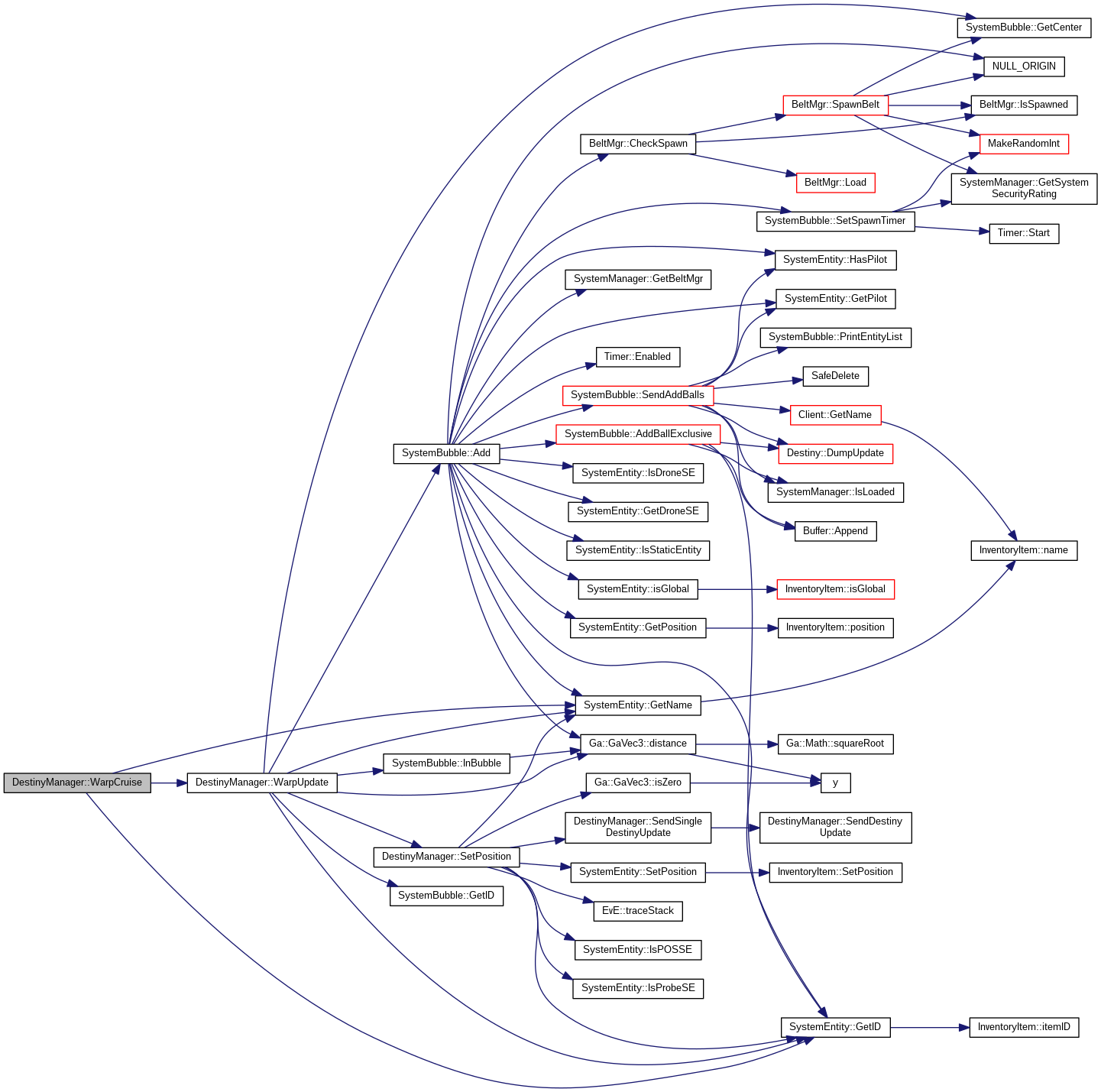
| void | WarpCruise (uint16 sec_into_warp) |
| void | WarpDecel (uint16 sec_into_warp) |
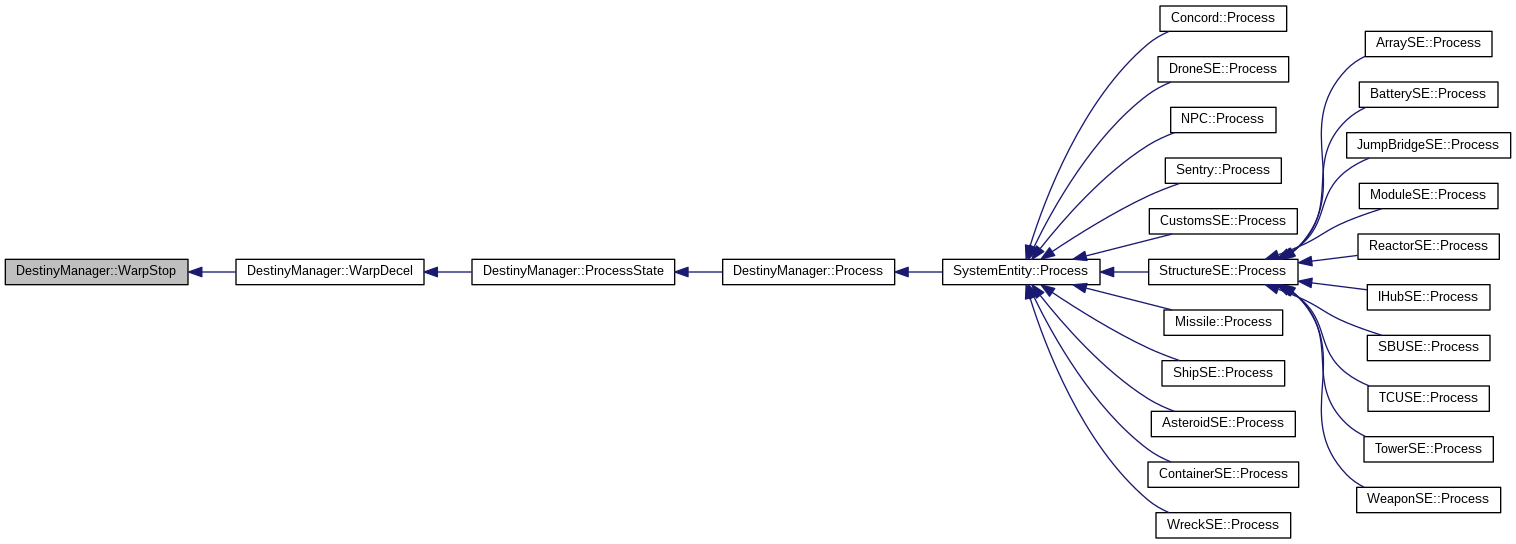
| void | WarpStop (double currentShipSpeed) |
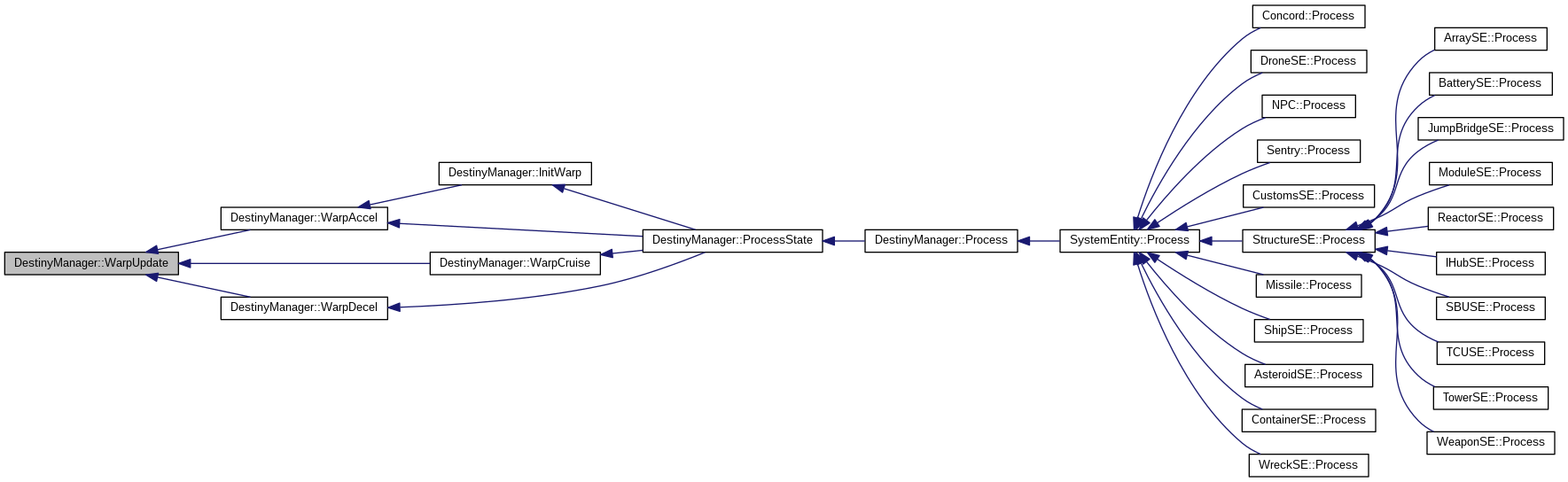
| void | WarpUpdate (double currentShipSpeed) |
Private Attributes | |
| bool | m_frozen |
| bool | m_changeDelay |
| bool | m_bump |
| double | m_inclination |
| double | m_longAscNode |
| Timer | m_warpTimer |
| WarpState * | m_warpState |
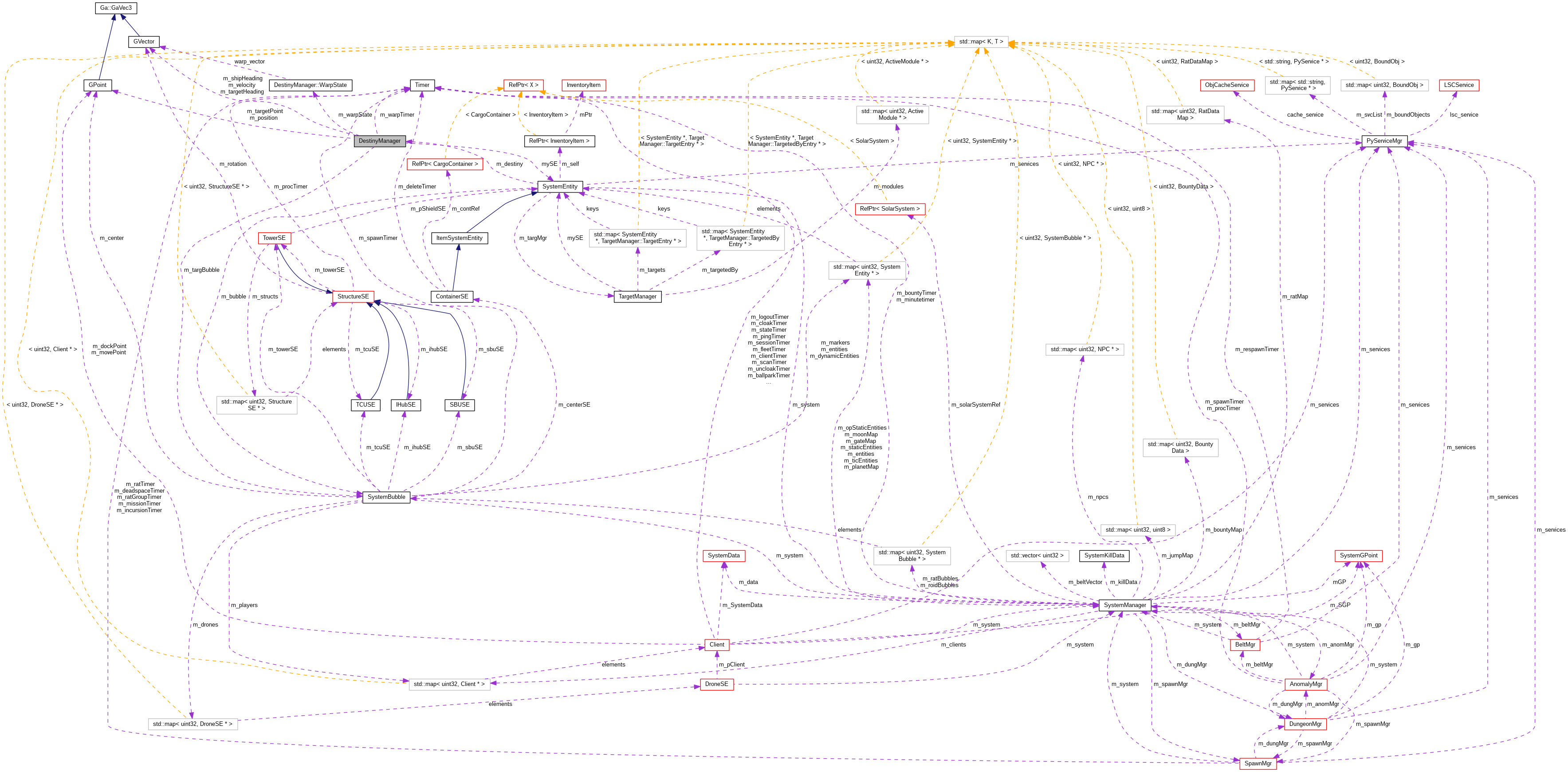
Definition at line 96 of file DestinyManager.h.
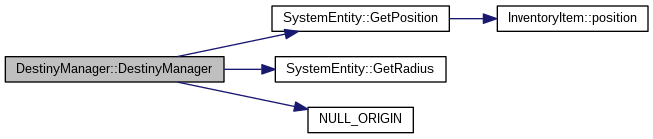
| DestinyManager::DestinyManager | ( | SystemEntity * | self | ) |
Definition at line 49 of file DestinyManager.cpp.
References SystemEntity::GetPosition(), SystemEntity::GetRadius(), m_accel, m_activeSpeedFraction, m_bump, m_capNeeded, m_changeDelay, m_cloaked, m_currentSpeedFraction, m_decel, m_degPerTic, m_hasSentShipUpdates, m_inBubble, m_inclination, m_longAscNode, m_maxOrbitSpeedFraction, m_orbiting, m_orbitRadTic, m_orbitTime, m_position, m_prevSpeed, m_prevSpeedFraction, m_radius, m_shipHeading, m_stateStamp, m_stop, m_targetEntity, m_targetHeading, m_targetPoint, m_tractored, m_tractorPause, m_turnFraction, m_turning, m_turnTic, m_userSpeedFraction, m_velocity, mySE, and NULL_ORIGIN().
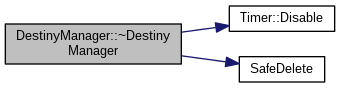
| DestinyManager::~DestinyManager | ( | ) |
Definition at line 119 of file DestinyManager.cpp.
References Timer::Disable(), m_warpState, m_warpTimer, and SafeDelete().
| void DestinyManager::AlignTo | ( | SystemEntity * | pSE | ) |
Definition at line 1863 of file DestinyManager.cpp.
References Follow().
Referenced by AttemptDockOperation().


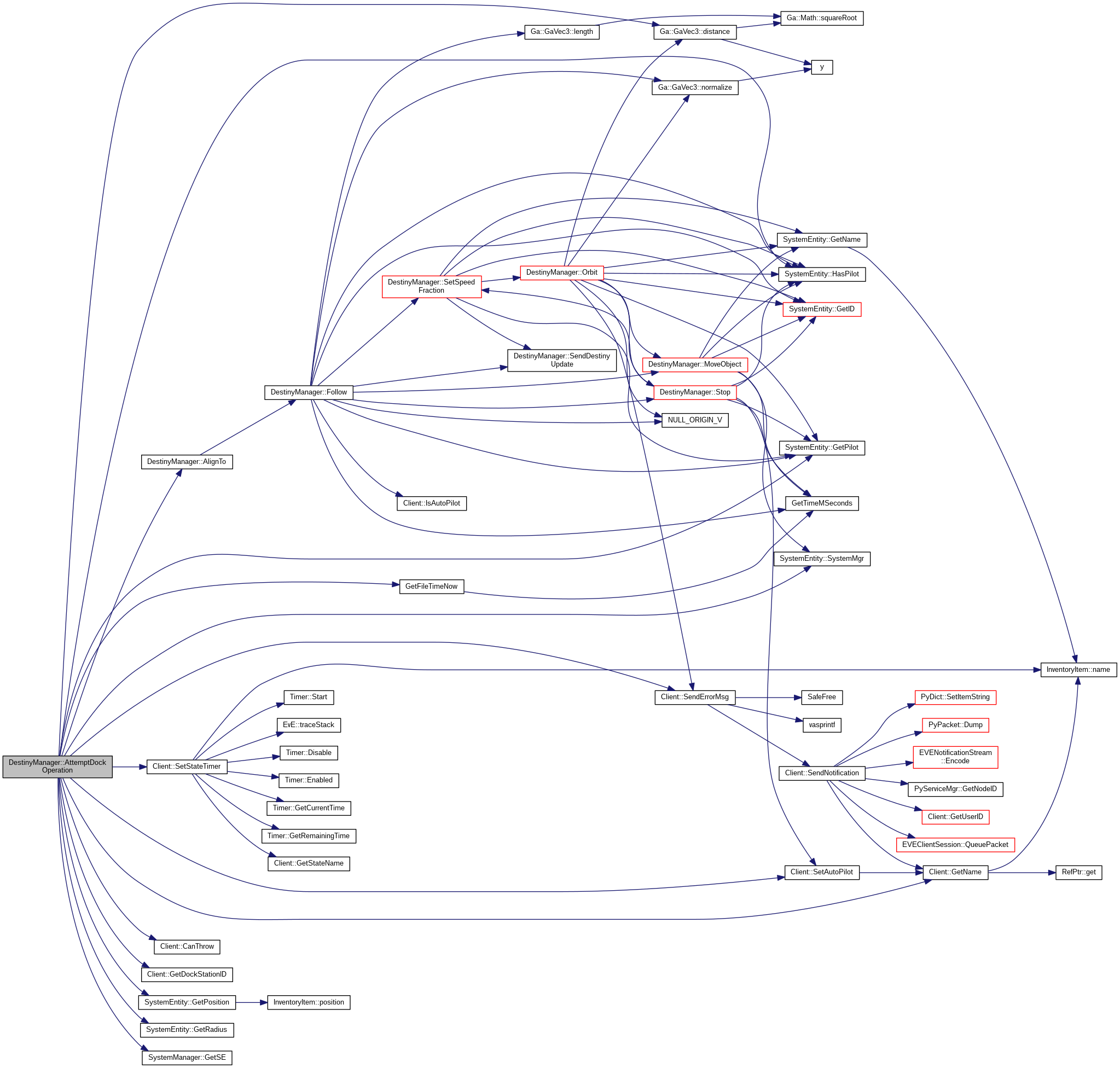
| PyResult DestinyManager::AttemptDockOperation | ( | ) |
Definition at line 2254 of file DestinyManager.cpp.
References _log, AlignTo(), Client::CanThrow(), codelog, Ga::GaVec3::distance(), Player::State::Dock, Client::GetDockStationID(), GetFileTimeNow(), Client::GetName(), SystemEntity::GetPilot(), SystemEntity::GetPosition(), SystemEntity::GetRadius(), SystemManager::GetSE(), SystemEntity::HasPilot(), m_position, mySE, PyStatic, sConfig, Client::SendErrorMsg(), Client::SetAutoPilot(), Client::SetStateTimer(), and SystemEntity::SystemMgr().
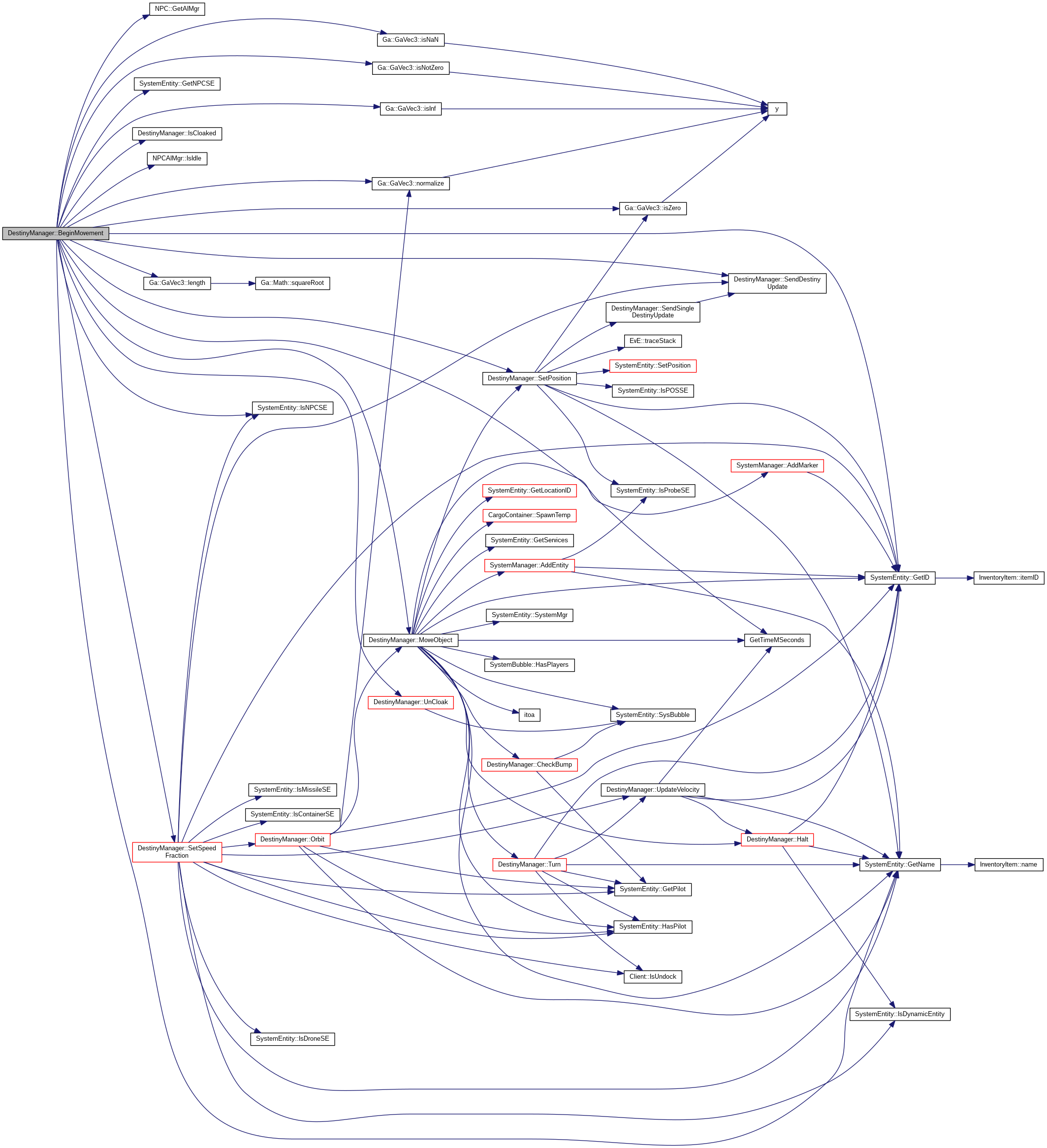
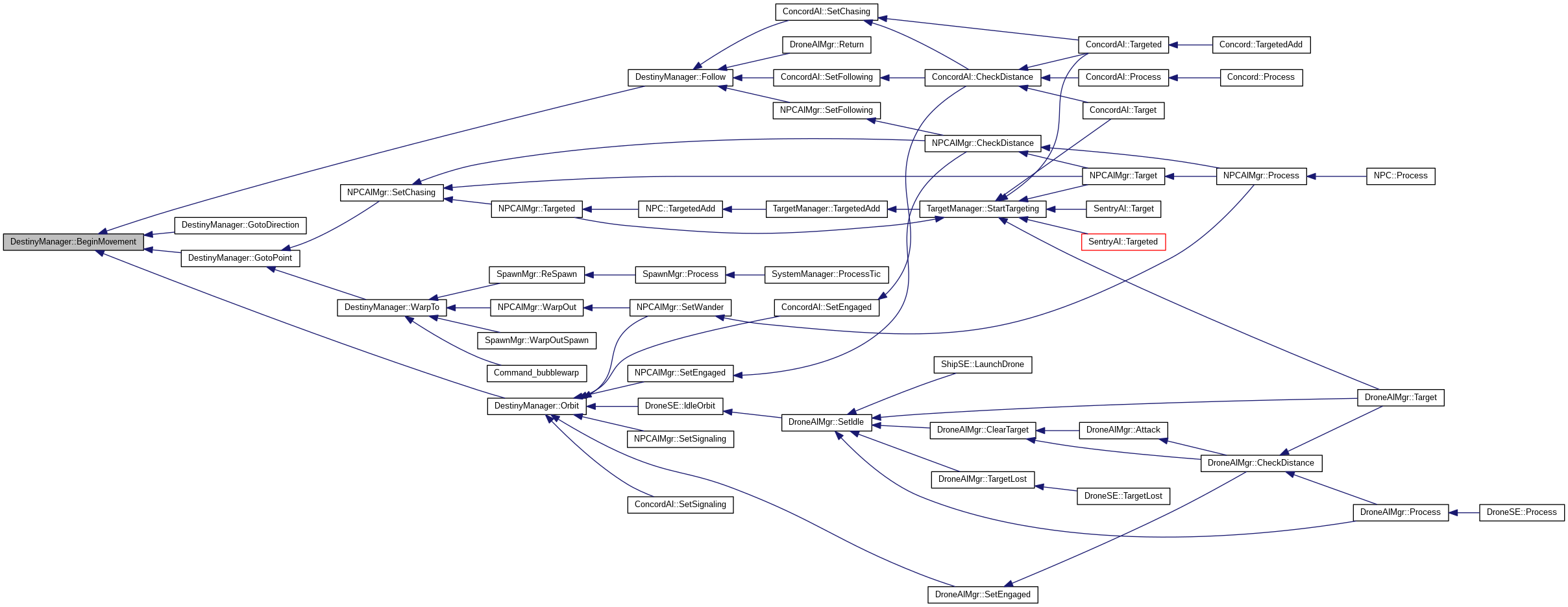
|
protected |
Definition at line 1739 of file DestinyManager.cpp.
References _log, NPC::GetAIMgr(), SystemEntity::GetID(), SystemEntity::GetName(), SystemEntity::GetNPCSE(), GetTimeMSeconds(), IsCloaked(), NPCAIMgr::IsIdle(), Ga::GaVec3::isInf(), Ga::GaVec3::isNaN(), Ga::GaVec3::isNotZero(), SystemEntity::IsNPCSE(), Ga::GaVec3::isZero(), Ga::GaVec3::length(), m_accel, m_currentSpeedFraction, m_decel, m_hasSentShipUpdates, m_mass, m_maxOrbitSpeedFraction, m_moveTime, m_orbiting, m_orbitRadTic, m_position, m_shipAgility, m_shipHeading, m_shipInertia, m_shipMaxAccelTime, m_stateStamp, m_stop, m_targetDistance, m_targetHeading, m_targetPoint, m_turning, m_turnTic, m_userSpeedFraction, MoveObject(), mySE, Destiny::Ball::Orbit::None, Ga::GaVec3::normalize(), sConfig, SendDestinyUpdate(), sEntityList, SetPosition(), SetSpeedFraction(), and UnCloak().
Referenced by Follow(), GotoDirection(), GotoPoint(), and Orbit().
|
private |
Definition at line 664 of file DestinyManager.cpp.
References SystemEntity::GetID(), GetTimeMSeconds(), Destiny::Ball::Mode::GOTO, m_ballMode, m_currentSpeedFraction, m_maxShipSpeed, m_maxSpeed, m_moveTime, m_shipHeading, m_shipMaxAccelTime, m_stateStamp, m_stop, m_userSpeedFraction, m_velocity, mySE, SendDestinyUpdate(), sEntityList, Stop(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
|
private |
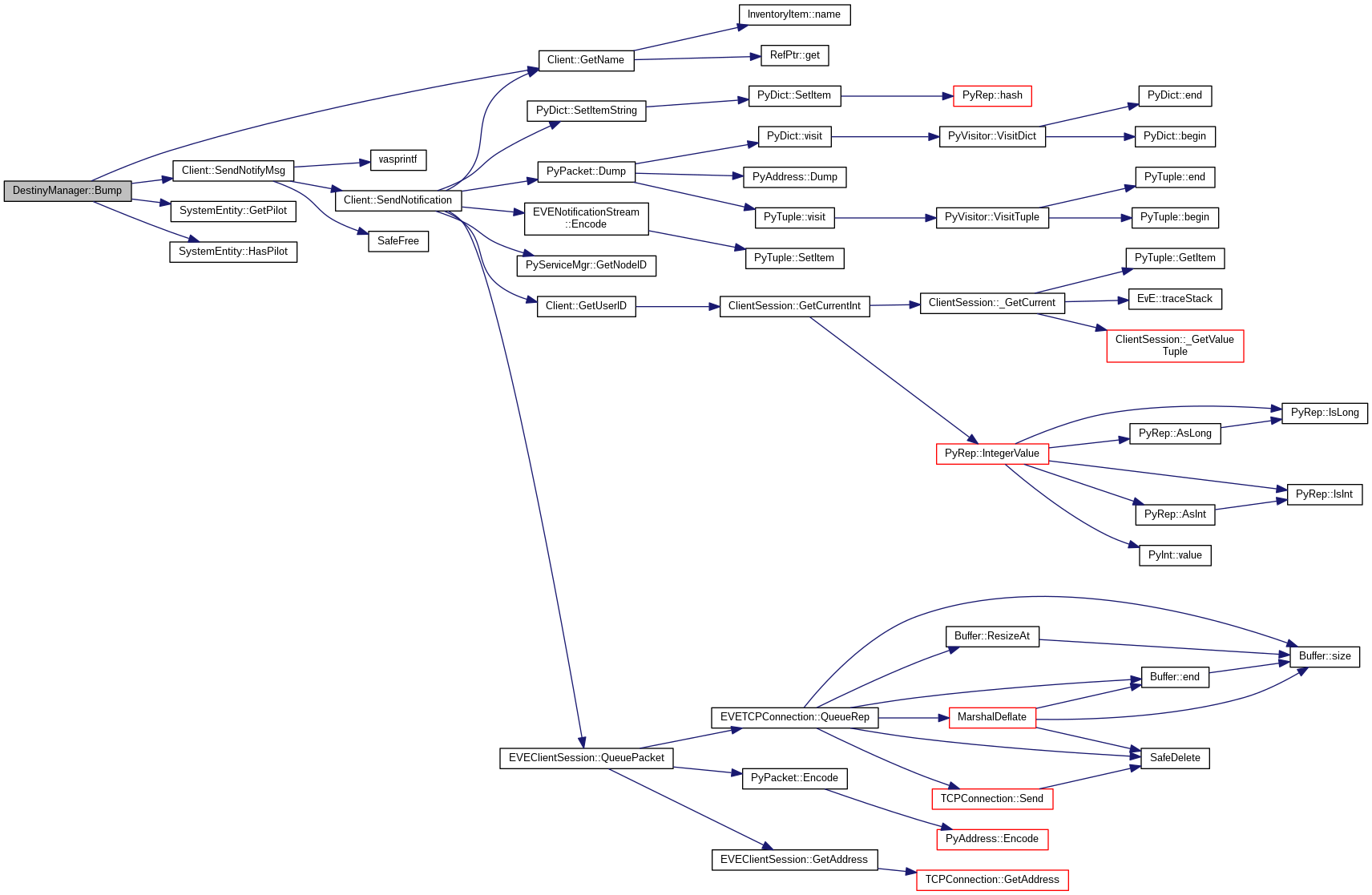
Definition at line 629 of file DestinyManager.cpp.
References Client::GetName(), SystemEntity::GetPilot(), SystemEntity::HasPilot(), m_bump, mySE, and Client::SendNotifyMsg().
Referenced by CheckBump().
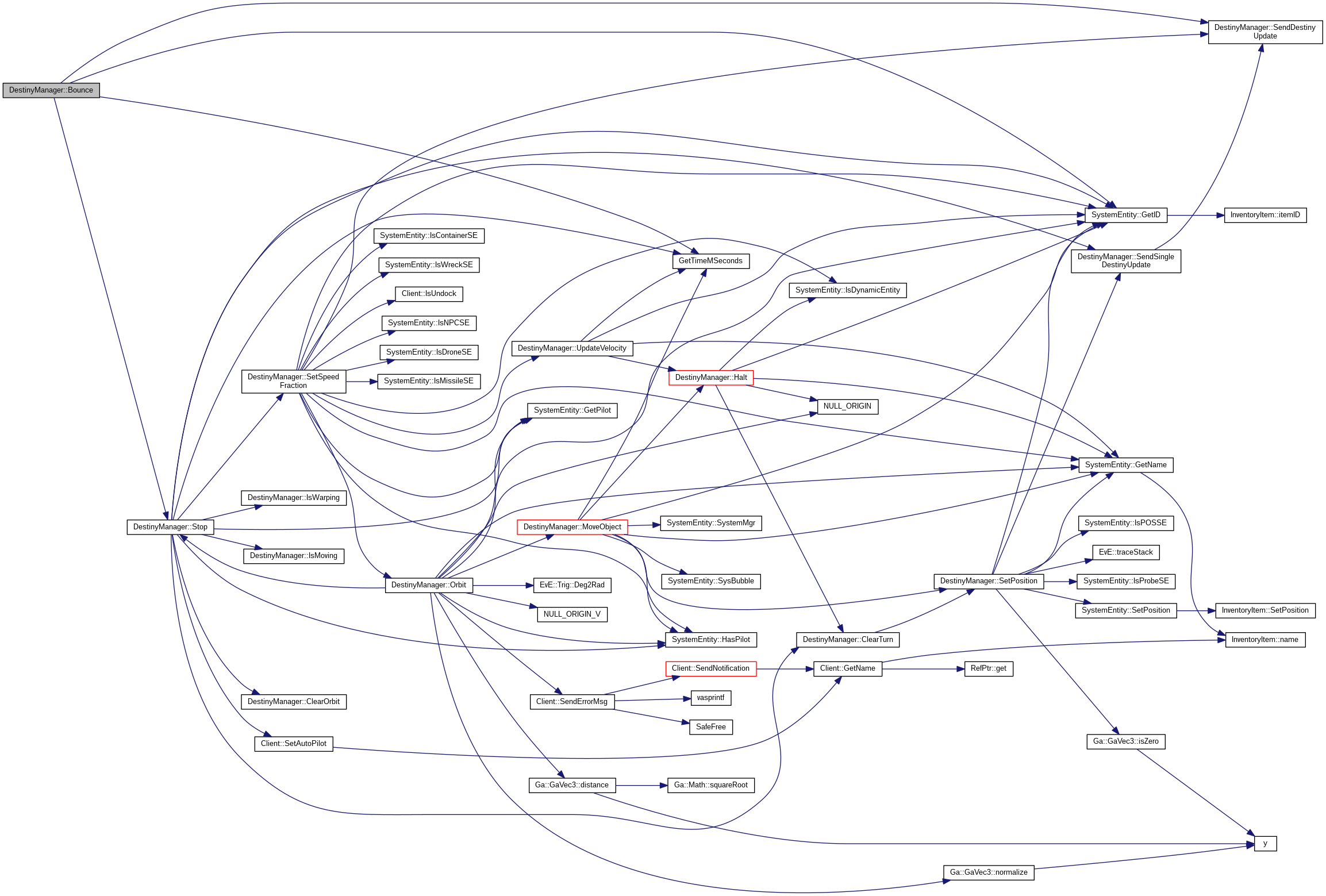
|
private |
Definition at line 589 of file DestinyManager.cpp.
References Bump(), BUMP_DISTANCE, Profile::collision, Ga::GaVec3::distance(), SystemEntity::GetPilot(), SystemBubble::GetPlayers(), GetPosition(), SystemEntity::GetRadius(), GetTimeUSeconds(), m_bump, mySE, sConfig, sProfiler, and SystemEntity::SysBubble().
Referenced by MoveObject().
|
private |
Definition at line 1446 of file DestinyManager.cpp.
References m_followDistance, m_maxOrbitSpeedFraction, m_orbiting, m_orbitRadTic, m_orbitTime, m_targetDistance, and Destiny::Ball::Orbit::None.
Referenced by Follow(), GotoDirection(), GotoPoint(), and Stop().
|
private |
Definition at line 1090 of file DestinyManager.cpp.
References m_alignTime, m_position, m_radians, m_timeToEnterWarp, m_turnFraction, m_turning, m_turnTic, and SetPosition().
Referenced by Halt(), InitWarp(), IsTurn(), Stop(), and Turn().
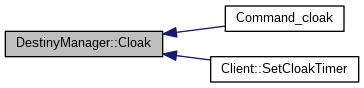
| void DestinyManager::Cloak | ( | ) |
Definition at line 2676 of file DestinyManager.cpp.
References m_cloaked, mySE, SystemBubble::RemoveExclusive(), SendCloakFx(), and SystemEntity::SysBubble().
Referenced by Command_cloak(), and Client::SetCloakTimer().

|
private |
Definition at line 1357 of file DestinyManager.cpp.
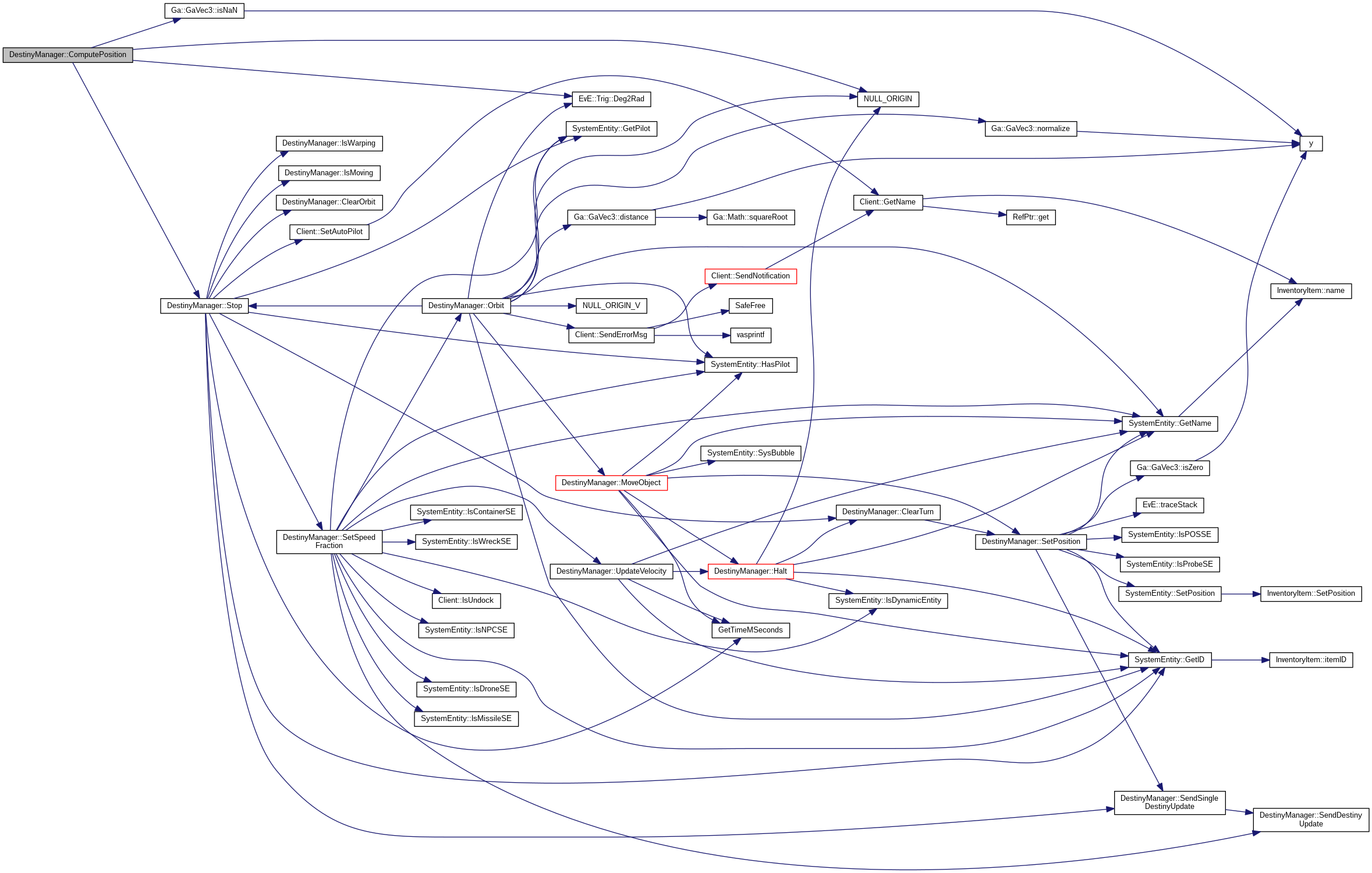
References _log, EvE::Trig::Deg2Rad(), Ga::GaVec3::isNaN(), LogMacro, m_orbitRadTic, m_orbitTime, m_position, m_radius, m_targetDistance, m_targetEntity, NULL_ORIGIN(), Stop(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
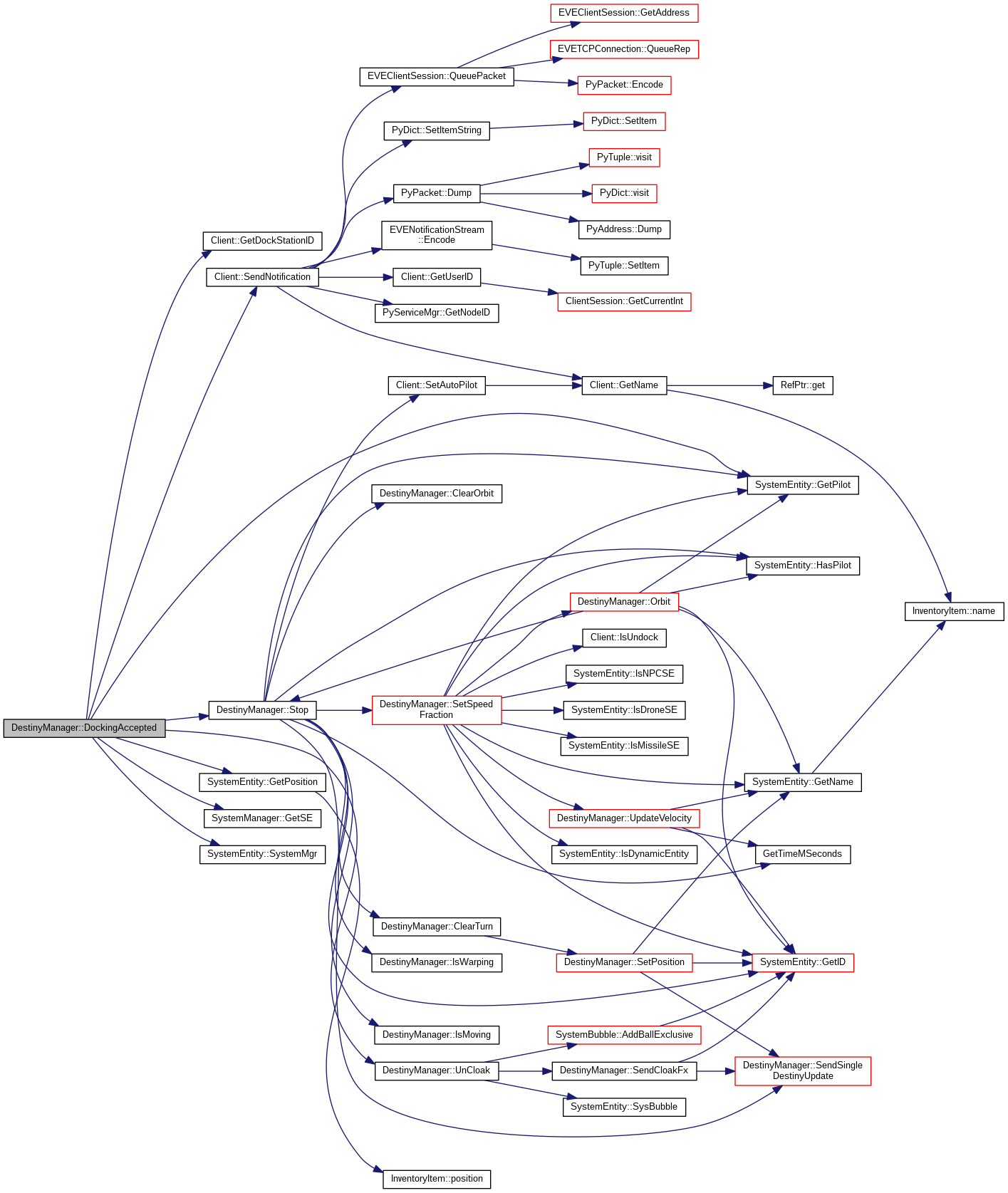
| void DestinyManager::DockingAccepted | ( | ) |
Definition at line 2285 of file DestinyManager.cpp.
References Client::GetDockStationID(), SystemEntity::GetPilot(), SystemEntity::GetPosition(), SystemManager::GetSE(), m_position, mySE, Client::SendNotification(), Stop(), SystemEntity::SystemMgr(), UnCloak(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by Client::DockToStation().

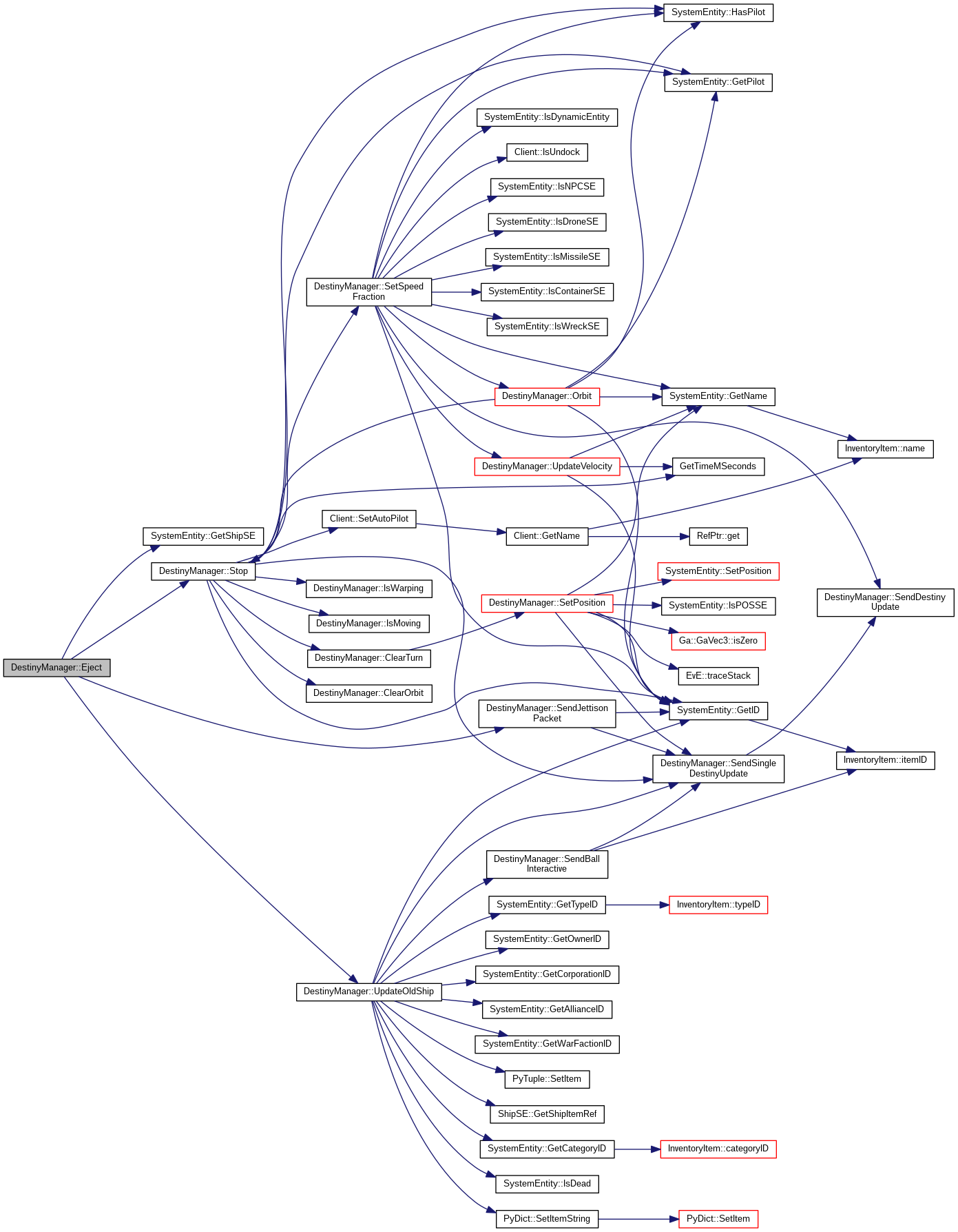
| void DestinyManager::Eject | ( | ) |
Definition at line 579 of file DestinyManager.cpp.
References SystemEntity::GetShipSE(), mySE, SendJettisonPacket(), Stop(), and UpdateOldShip().
Referenced by Client::Board(), Client::Eject(), and Client::ResetAfterPopped().
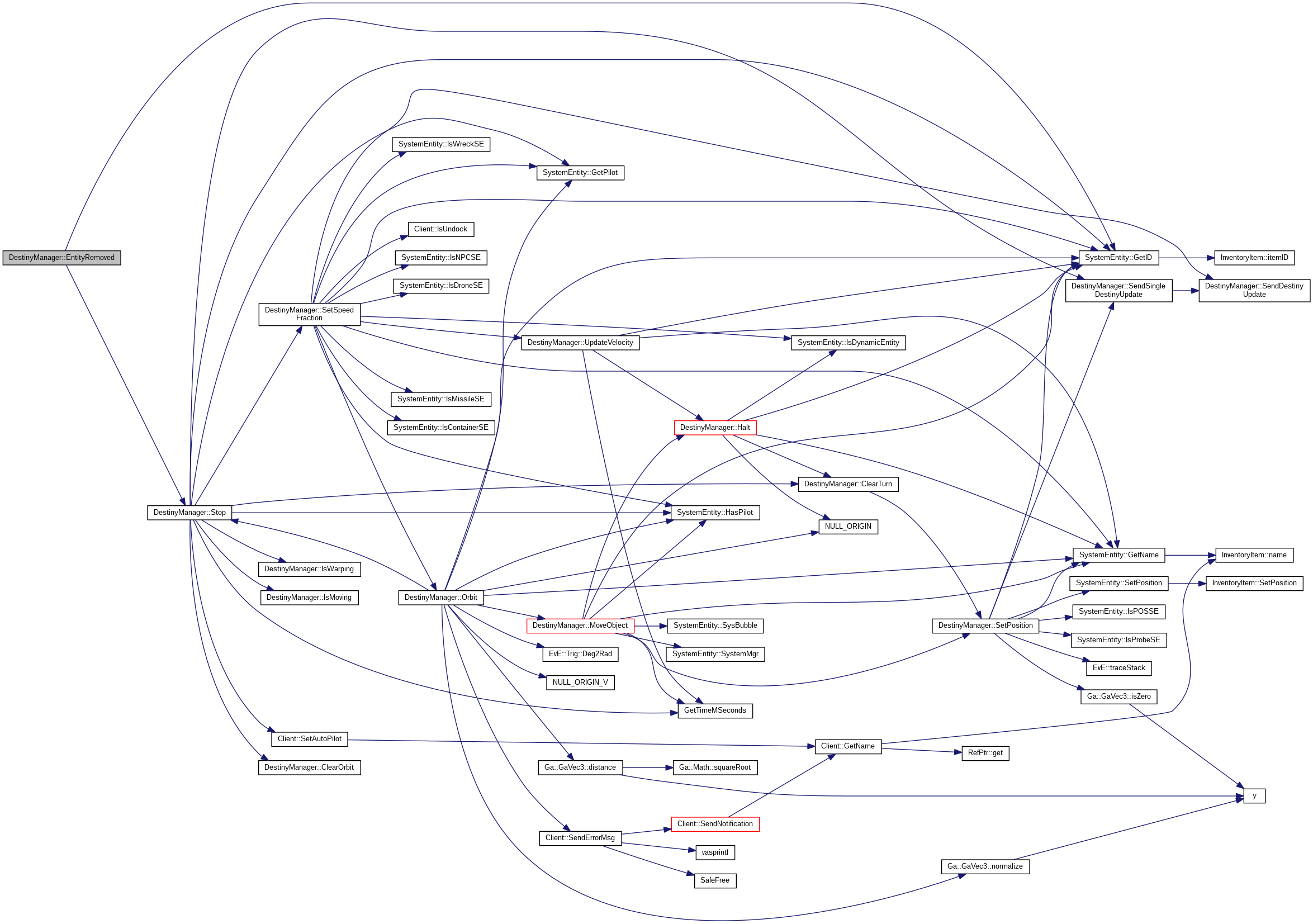
| void DestinyManager::EntityRemoved | ( | SystemEntity * | pSE | ) |
Definition at line 1698 of file DestinyManager.cpp.
References _log, Destiny::Ball::Mode::FOLLOW, SystemEntity::GetID(), m_ballMode, m_targetEntity, mySE, Destiny::Ball::Mode::ORBIT, and Stop().
Referenced by TargetManager::TargetLost().
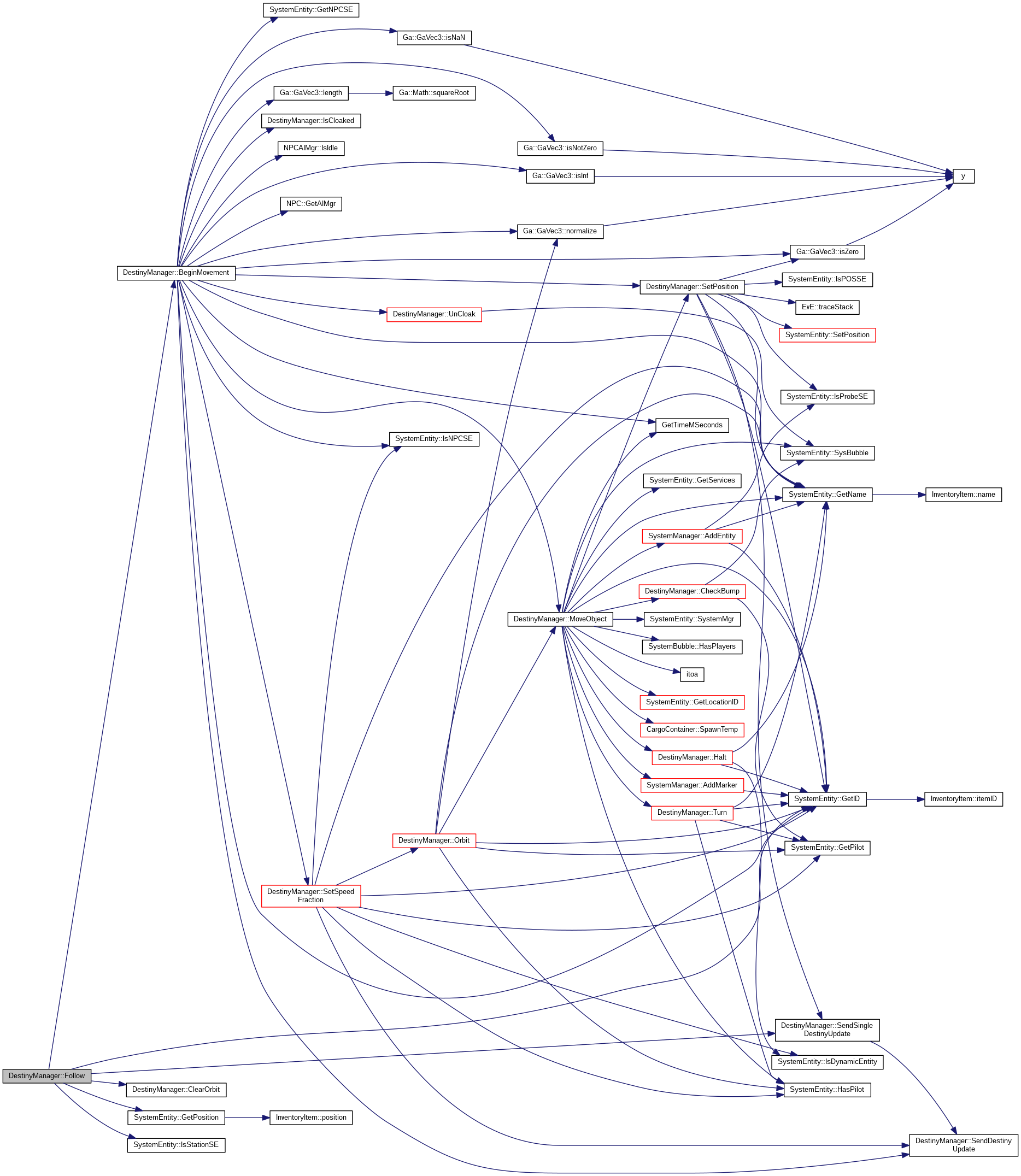
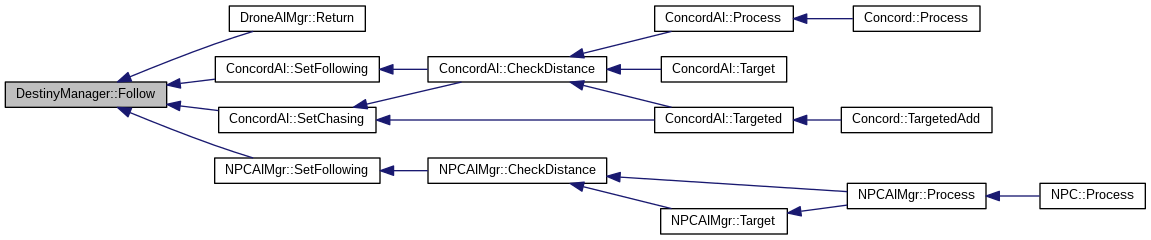
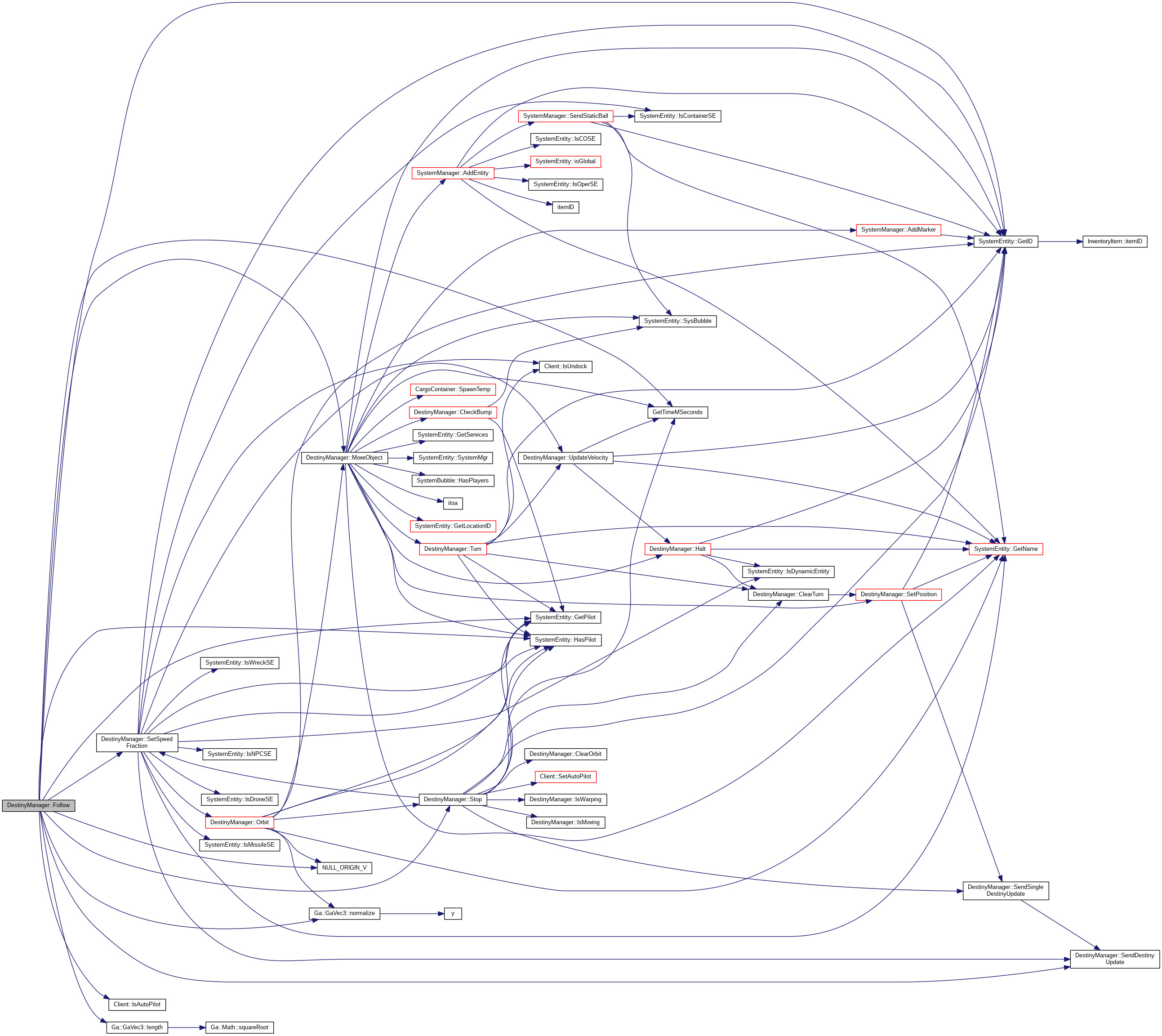
| void DestinyManager::Follow | ( | SystemEntity * | pSE, |
| uint32 | distance | ||
| ) |
Definition at line 1829 of file DestinyManager.cpp.
References BeginMovement(), ClearOrbit(), Destiny::Ball::Mode::FOLLOW, SystemEntity::GetID(), SystemEntity::GetPosition(), SystemEntity::IsStationSE(), m_ballMode, m_followDistance, m_orbiting, m_targetEntity, m_targetPoint, m_userSpeedFraction, mySE, SendSingleDestinyUpdate(), stDataMgr, and Ga::GaVec3::y.
Referenced by DroneAIMgr::Return(), ConcordAI::SetChasing(), NPCAIMgr::SetFollowing(), and ConcordAI::SetFollowing().
|
protected |
Definition at line 1100 of file DestinyManager.cpp.
References _log, SystemEntity::GetID(), SystemEntity::GetPilot(), GetTimeMSeconds(), SystemEntity::HasPilot(), Client::IsAutoPilot(), Ga::GaVec3::length(), m_activeSpeedFraction, m_currentSpeedFraction, m_followDistance, m_maxSpeed, m_moveTime, m_position, m_prevSpeedFraction, m_radius, m_shipHeading, m_stateStamp, m_targetDistance, m_targetEntity, m_targetPoint, m_tractored, m_tractorPause, m_userSpeedFraction, m_velocity, MoveObject(), mySE, Ga::GaVec3::normalize(), NULL_ORIGIN_V(), SendDestinyUpdate(), sEntityList, SetSpeedFraction(), and Stop().
Referenced by AlignTo(), ProcessState(), and WarpTo().
|
inline |
Definition at line 203 of file DestinyManager.h.
References m_shipMaxAccelTime.
Referenced by Command_shipvars().

|
inline |
Definition at line 197 of file DestinyManager.h.
References m_shipAgility.
Referenced by Command_shipvars().

|
inline |
Definition at line 202 of file DestinyManager.h.
References m_alignTime.
Referenced by Command_shipvars().

|
inline |
Definition at line 207 of file DestinyManager.h.
References m_warpCapacitorNeed.
Referenced by Command_shipvars().

|
inline |
|
inline |
Definition at line 195 of file DestinyManager.h.
References m_targetDistance.
Referenced by Concord::EncodeDestiny(), Missile::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), and ShipSE::EncodeDestiny().
|
inline |
Definition at line 200 of file DestinyManager.h.
References m_shipHeading.
Referenced by Command_shipvars().

|
inline |
Definition at line 198 of file DestinyManager.h.
References m_shipInertia.
Referenced by Command_shipvars(), Concord::EncodeDestiny(), Missile::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), ShipSE::EncodeDestiny(), and DynamicSystemEntity::EncodeDestiny().
|
inline |
Definition at line 196 of file DestinyManager.h.
References m_mass.
Referenced by Command_shipvars(), Concord::EncodeDestiny(), Missile::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), ShipSE::EncodeDestiny(), and DynamicSystemEntity::EncodeDestiny().
|
inline |
Definition at line 194 of file DestinyManager.h.
References m_maxShipSpeed.
Referenced by CynoModule::Activate(), Command_shipvars(), Concord::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), ShipSE::EncodeDestiny(), and DynamicSystemEntity::EncodeDestiny().
|
inline |
Definition at line 109 of file DestinyManager.h.
References m_position.
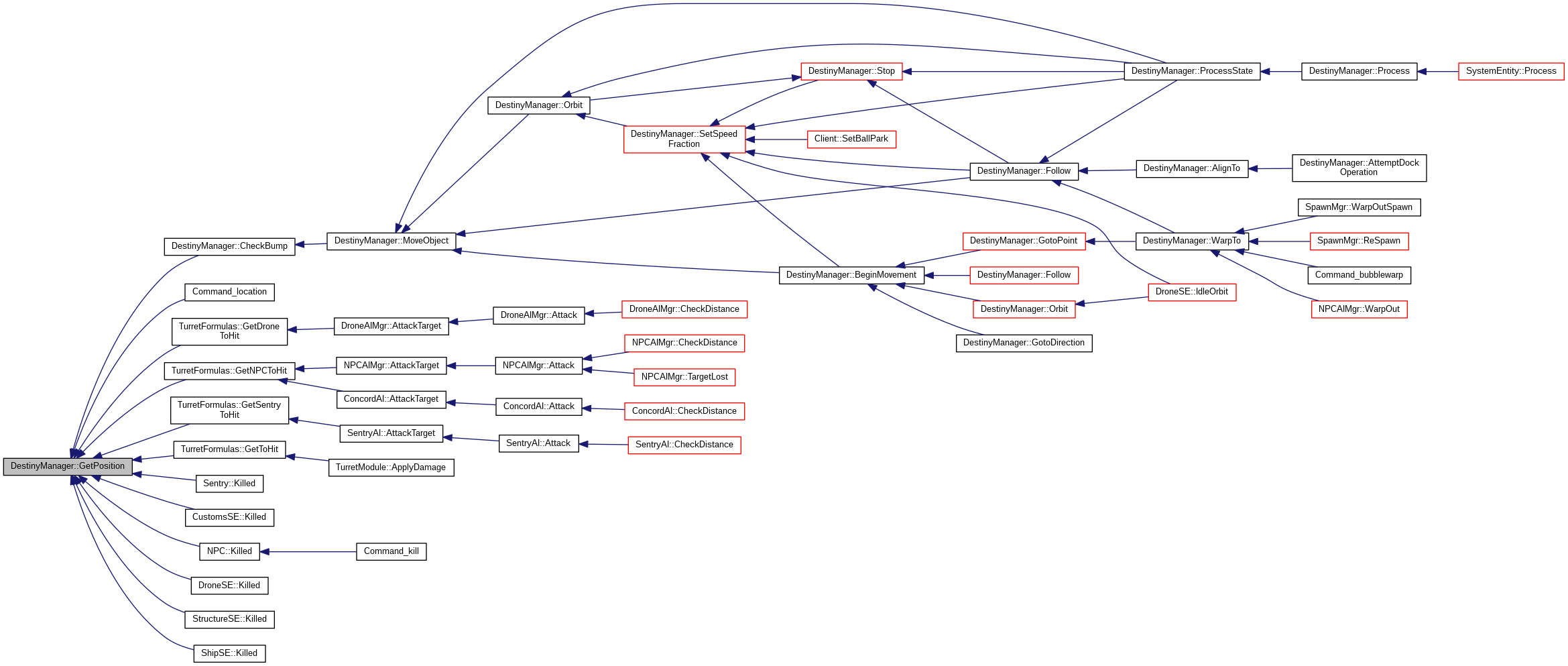
Referenced by CheckBump(), Command_location(), TurretFormulas::GetDroneToHit(), TurretFormulas::GetNPCToHit(), TurretFormulas::GetSentryToHit(), TurretFormulas::GetToHit(), Sentry::Killed(), CustomsSE::Killed(), NPC::Killed(), DroneSE::Killed(), StructureSE::Killed(), and ShipSE::Killed().
|
inline |
Definition at line 206 of file DestinyManager.h.
References m_radius.
Referenced by Command_shipvars().

|
inline |
|
inline |
Definition at line 112 of file DestinyManager.h.
References m_currentSpeedFraction, and m_maxShipSpeed.
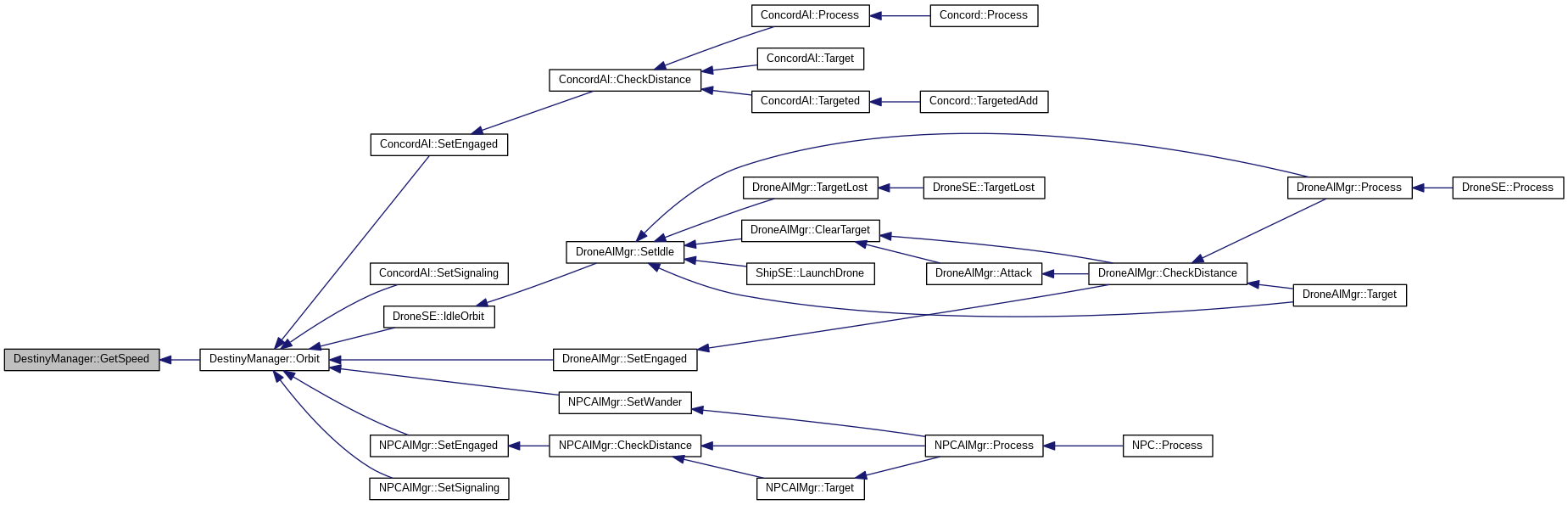
Referenced by Orbit().
|
inline |
Definition at line 111 of file DestinyManager.h.
References m_currentSpeedFraction.
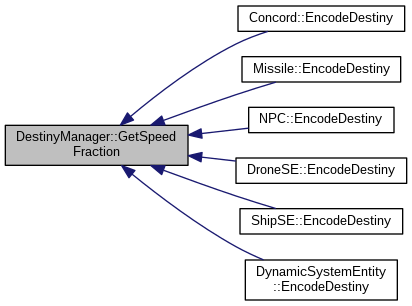
Referenced by Concord::EncodeDestiny(), Missile::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), ShipSE::EncodeDestiny(), and DynamicSystemEntity::EncodeDestiny().
|
inline |
Definition at line 115 of file DestinyManager.h.
References m_ballMode.
Referenced by Concord::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), and ShipSE::EncodeDestiny().
|
inline |
Definition at line 199 of file DestinyManager.h.
References m_stateStamp.
Referenced by Missile::EncodeDestiny().

|
inline |
Definition at line 192 of file DestinyManager.h.
References m_targetEntity.
|
inline |
Definition at line 191 of file DestinyManager.h.
References m_targetEntity.
Referenced by Concord::EncodeDestiny(), Missile::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), and ShipSE::EncodeDestiny().
|
inline |
Definition at line 193 of file DestinyManager.h.
References m_targetPoint.
Referenced by Concord::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), and ShipSE::EncodeDestiny().
|
inline |
Definition at line 110 of file DestinyManager.h.
References m_velocity.
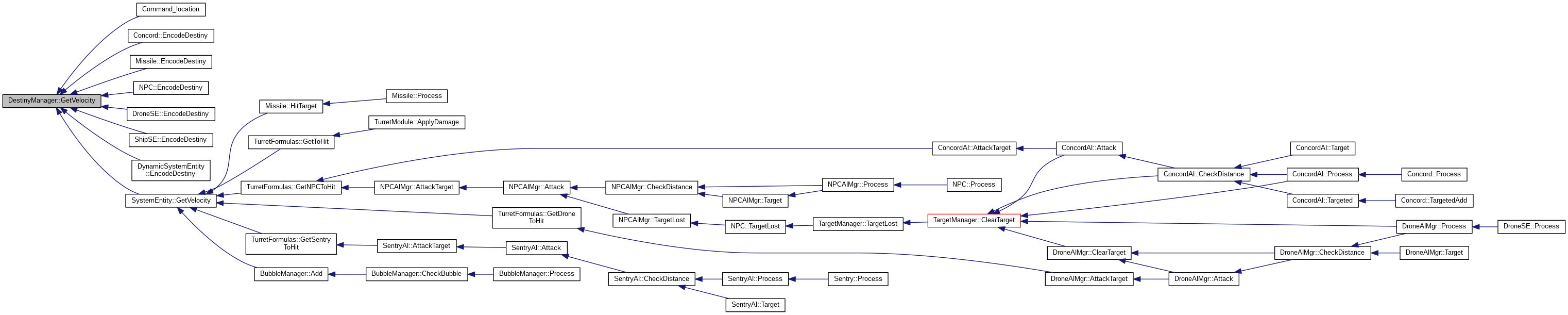
Referenced by Command_location(), Concord::EncodeDestiny(), Missile::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), ShipSE::EncodeDestiny(), DynamicSystemEntity::EncodeDestiny(), and SystemEntity::GetVelocity().
|
inline |
Definition at line 205 of file DestinyManager.h.
References m_speedToLeaveWarp.
Referenced by Command_shipvars().

|
inline |
Definition at line 190 of file DestinyManager.h.
References m_shipWarpSpeed.
Referenced by Command_shipvars(), Concord::EncodeDestiny(), NPC::EncodeDestiny(), DroneSE::EncodeDestiny(), ShipSE::EncodeDestiny(), and WarpTo().
|
inline |
Definition at line 204 of file DestinyManager.h.
References m_timeToEnterWarp.
Referenced by Command_shipvars().

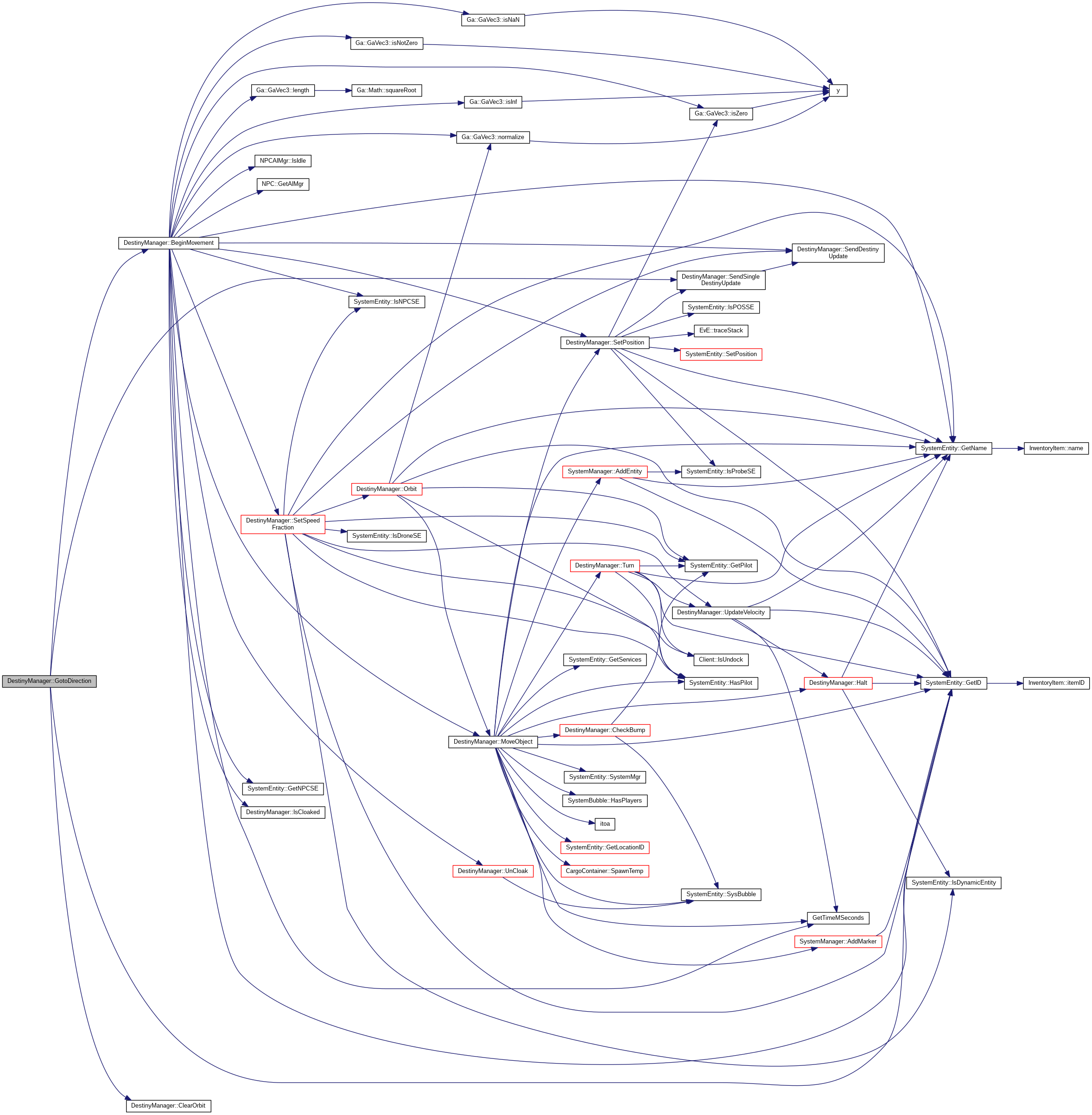
| void DestinyManager::GotoDirection | ( | const GPoint & | direction | ) |
Definition at line 1867 of file DestinyManager.cpp.
References BeginMovement(), ClearOrbit(), SystemEntity::GetID(), Destiny::Ball::Mode::GOTO, m_ballMode, m_orbiting, m_targetPoint, mySE, SendSingleDestinyUpdate(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
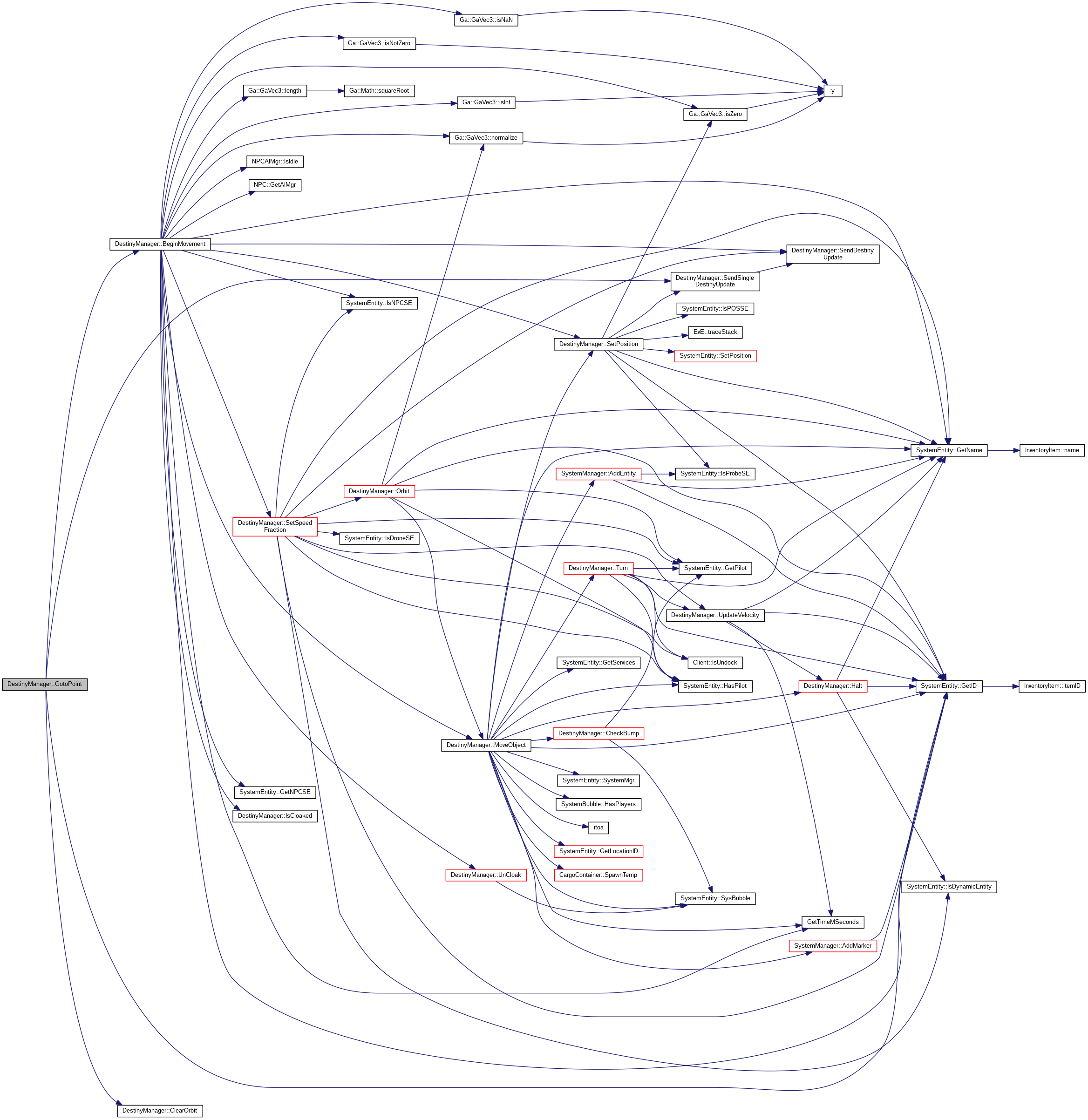
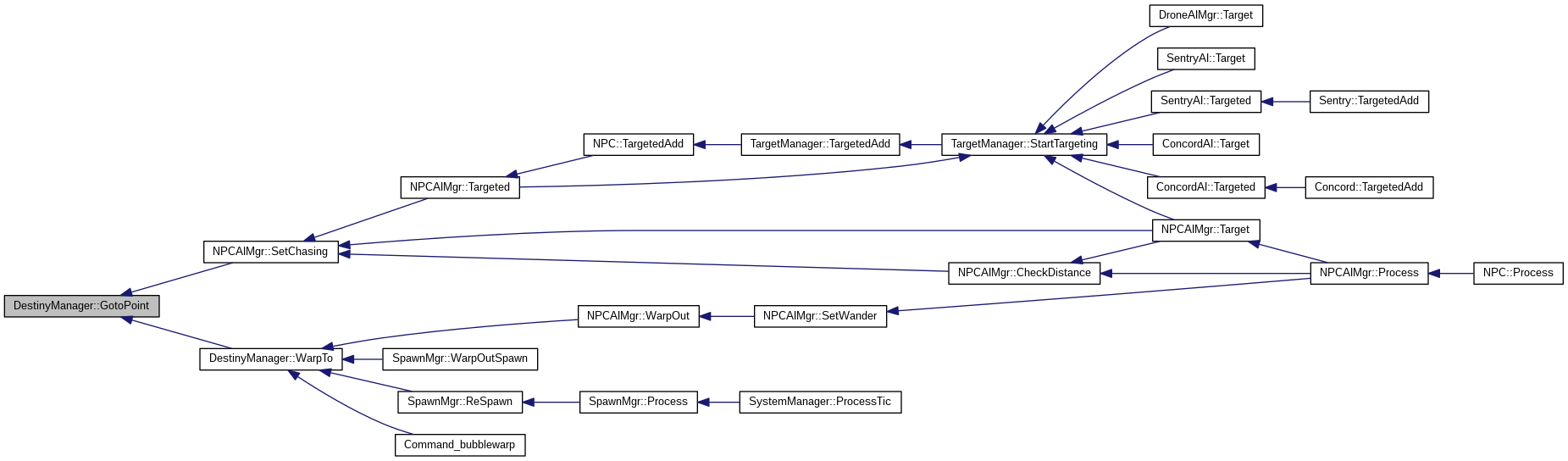
| void DestinyManager::GotoPoint | ( | const GPoint & | point | ) |
Definition at line 1885 of file DestinyManager.cpp.
References BeginMovement(), ClearOrbit(), SystemEntity::GetID(), Destiny::Ball::Mode::GOTO, m_ballMode, m_orbiting, m_targetPoint, mySE, SendSingleDestinyUpdate(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by NPCAIMgr::SetChasing(), and WarpTo().
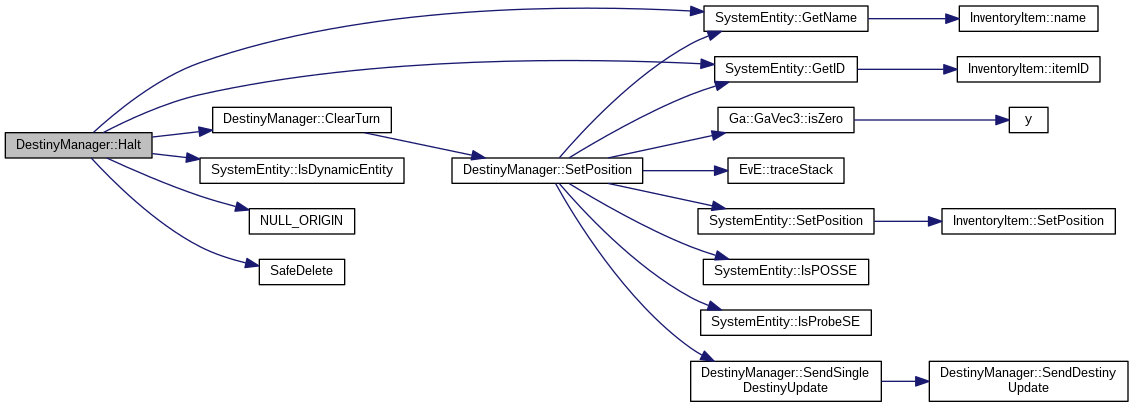
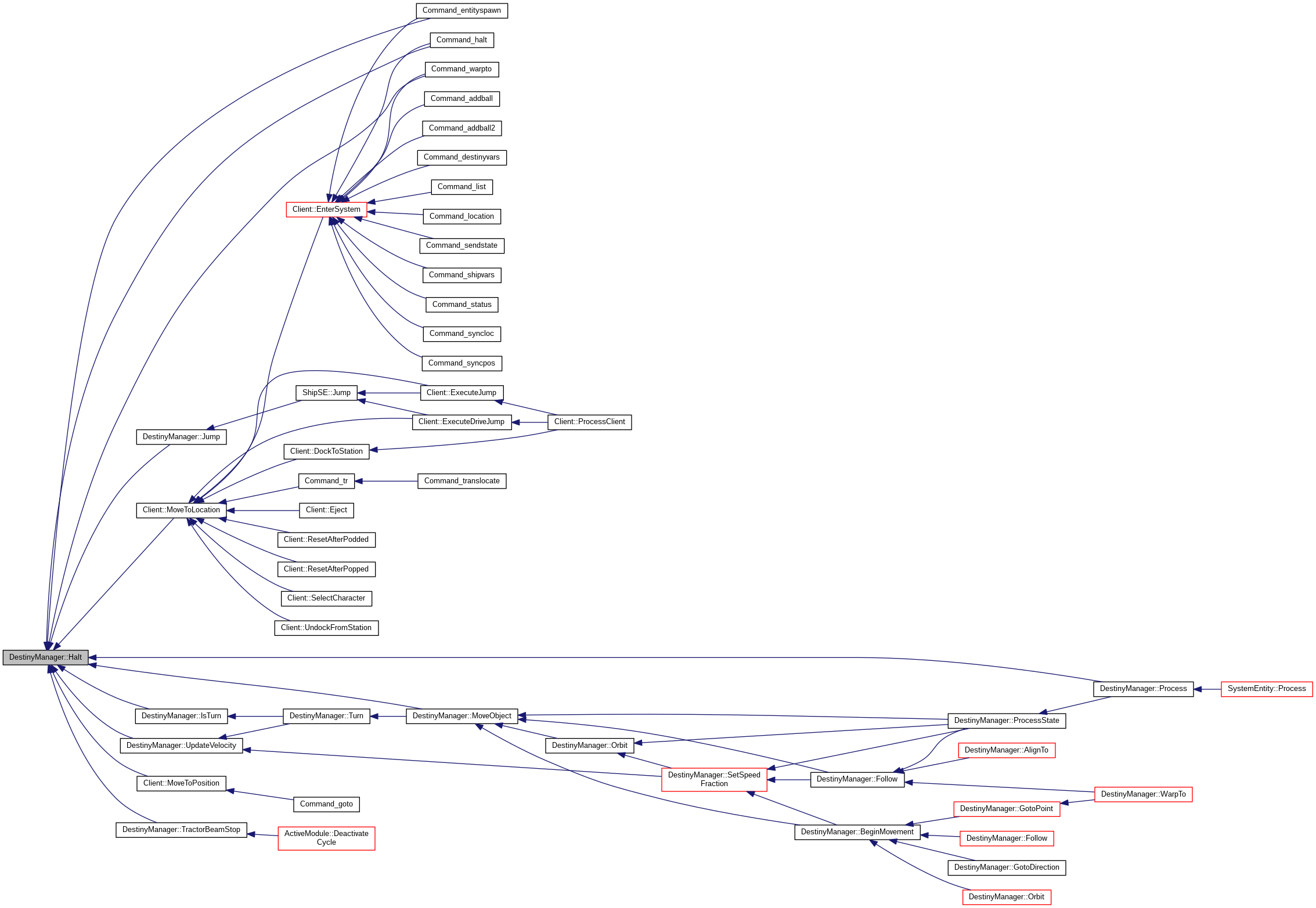
| void DestinyManager::Halt | ( | ) |
Definition at line 541 of file DestinyManager.cpp.
References _log, ClearTurn(), SystemEntity::GetID(), SystemEntity::GetName(), is_log_enabled, SystemEntity::IsDynamicEntity(), m_accel, m_activeSpeedFraction, m_ballMode, m_currentSpeedFraction, m_decel, m_followDistance, m_maxOrbitSpeedFraction, m_maxSpeed, m_moveTime, m_prevSpeed, m_prevSpeedFraction, m_shipAgility, m_shipHeading, m_shipMaxAccelTime, m_stateStamp, m_stop, m_stopDistance, m_targetDistance, m_targetEntity, m_targetPoint, m_turning, m_userSpeedFraction, m_velocity, m_warpState, mySE, NULL_ORIGIN(), SafeDelete(), Destiny::Ball::Mode::STOP, Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
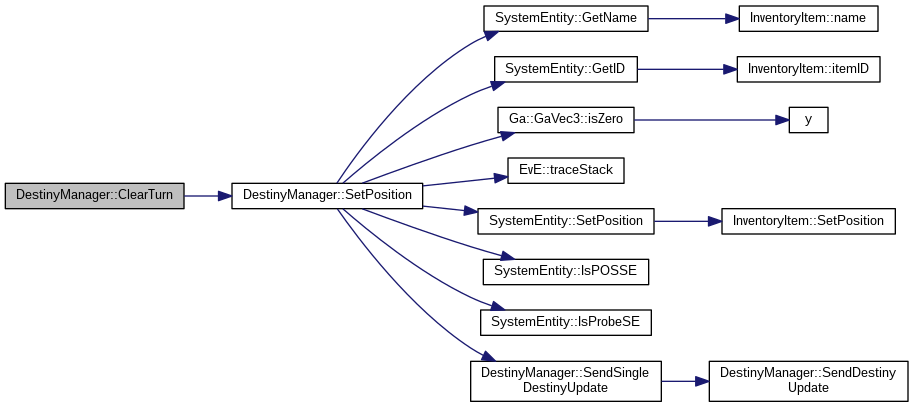
Referenced by Command_entityspawn(), Command_halt(), Command_warpto(), IsTurn(), Jump(), MoveObject(), Client::MoveToLocation(), Client::MoveToPosition(), Process(), TractorBeamStop(), and UpdateVelocity().
|
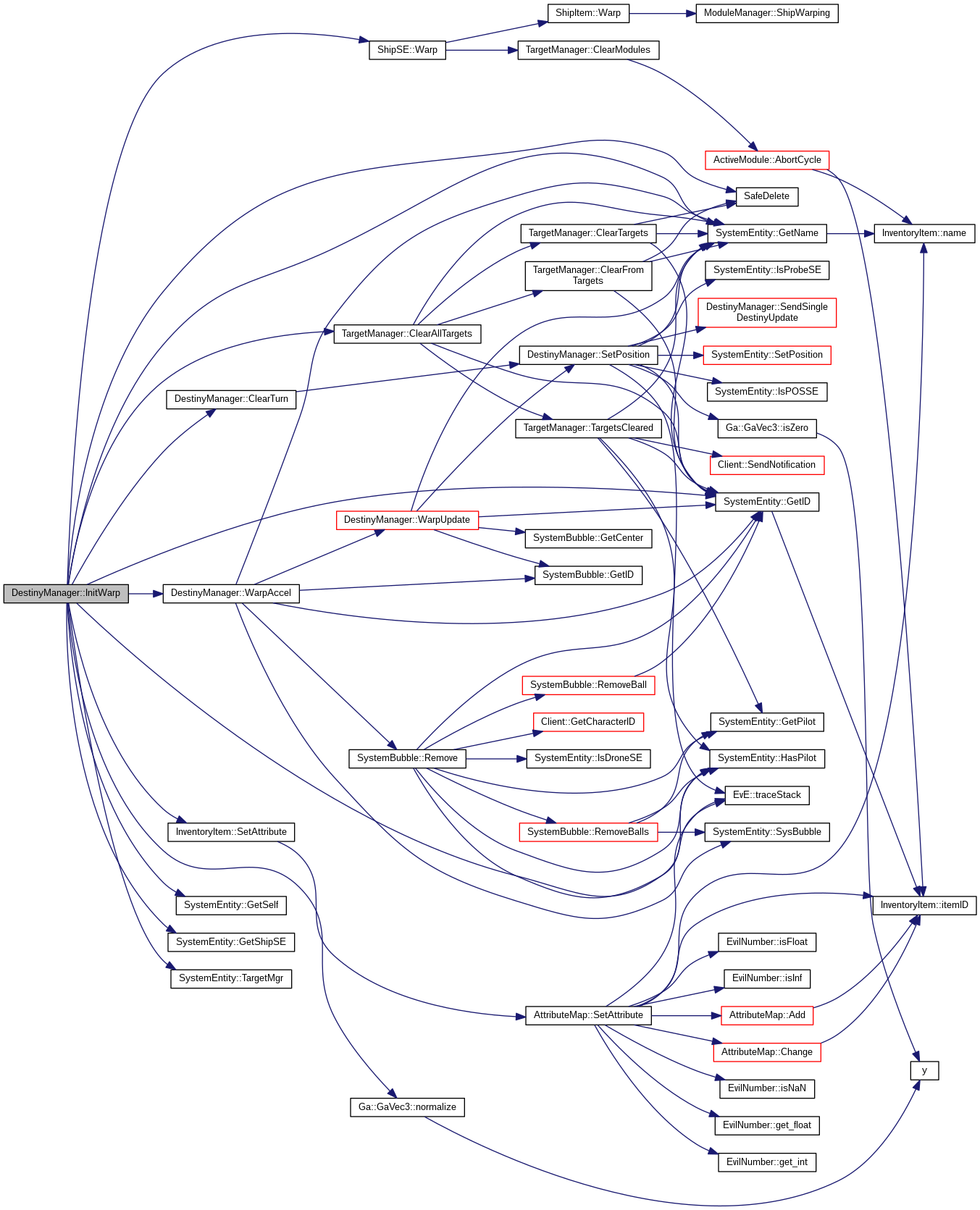
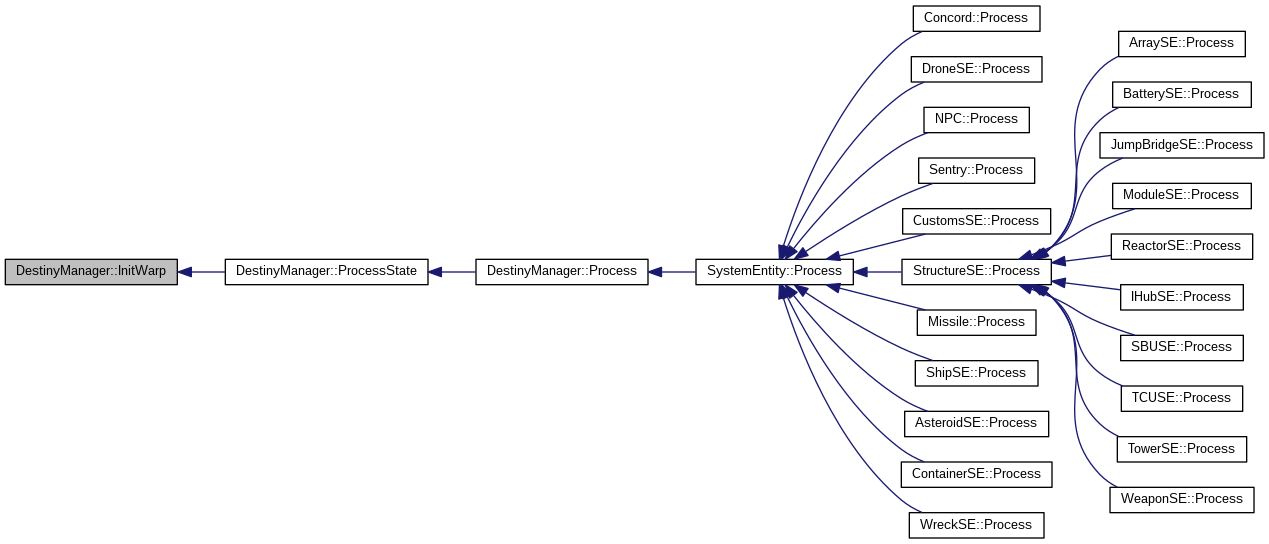
private |
Definition at line 1455 of file DestinyManager.cpp.
References _log, AttrCapacitorCharge, TargetManager::ClearAllTargets(), ClearTurn(), SystemEntity::GetID(), SystemEntity::GetName(), SystemEntity::GetSelf(), SystemEntity::GetShipSE(), SystemEntity::HasPilot(), is_log_enabled, m_capNeeded, m_position, m_shipWarpSpeed, m_stateStamp, m_targetDistance, m_targetPoint, m_turning, m_warpAccelTime, m_warpDecelTime, m_warpState, mySE, Ga::GaVec3::normalize(), ONE_AU_IN_METERS, SafeDelete(), sEntityList, InventoryItem::SetAttribute(), SystemEntity::TargetMgr(), ShipSE::Warp(), WarpAccel(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by ProcessState().
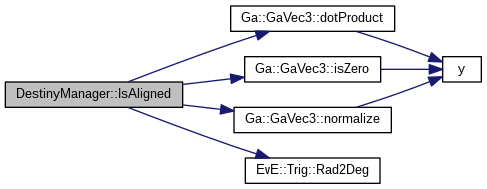
| bool DestinyManager::IsAligned | ( | GPoint & | targetPoint | ) |
Definition at line 2192 of file DestinyManager.cpp.
References Ga::GaVec3::dotProduct(), Ga::GaVec3::isZero(), m_position, m_shipHeading, Ga::GaVec3::normalize(), EvE::Trig::Rad2Deg(), and TURN_ALIGNMENT.
|
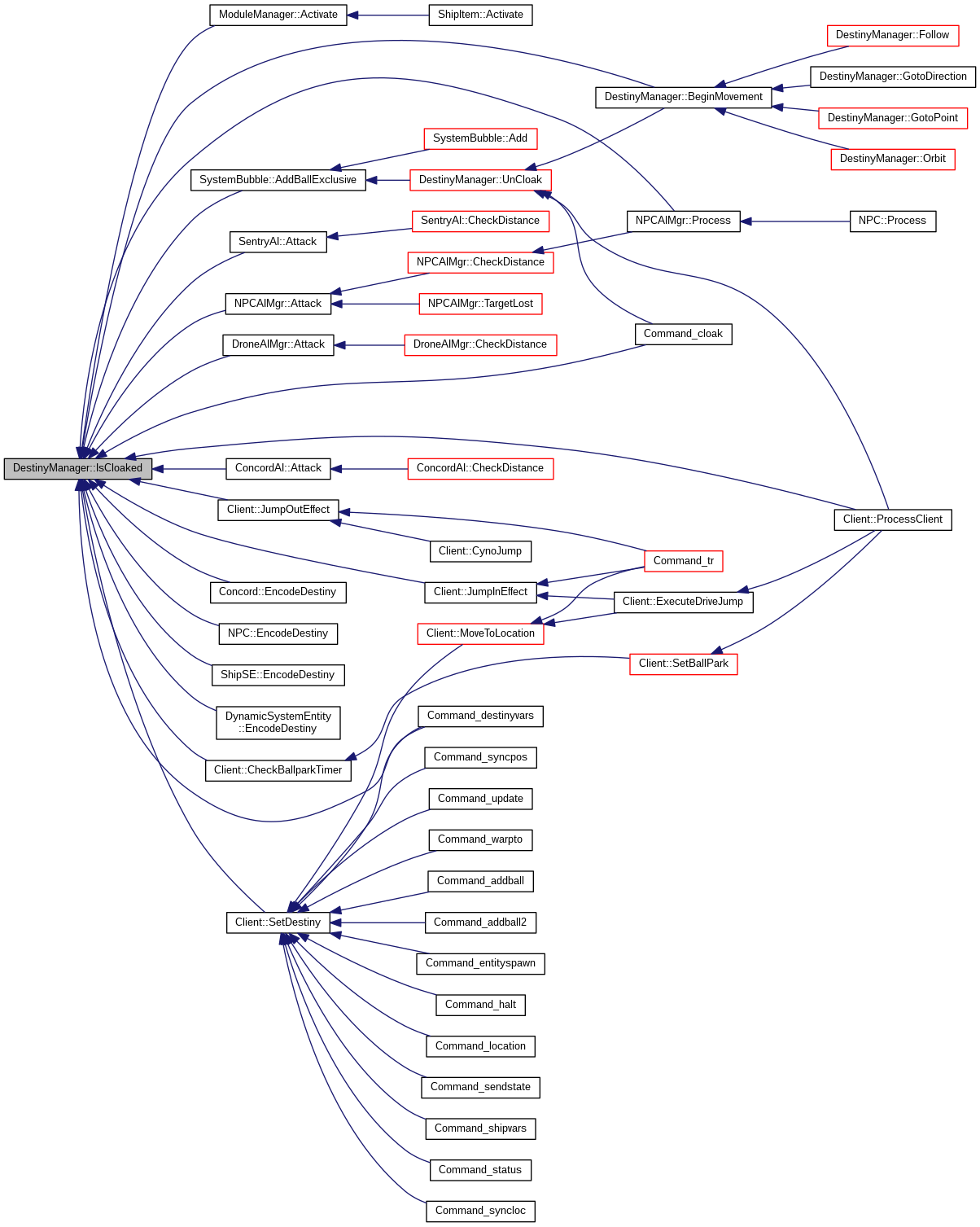
inline |
Definition at line 159 of file DestinyManager.h.
References m_cloaked.
Referenced by ModuleManager::Activate(), SystemBubble::AddBallExclusive(), SentryAI::Attack(), DroneAIMgr::Attack(), NPCAIMgr::Attack(), ConcordAI::Attack(), BeginMovement(), Client::CheckBallparkTimer(), Command_cloak(), Command_destinyvars(), Concord::EncodeDestiny(), NPC::EncodeDestiny(), ShipSE::EncodeDestiny(), DynamicSystemEntity::EncodeDestiny(), Client::JumpInEffect(), Client::JumpOutEffect(), NPCAIMgr::Process(), Client::ProcessClient(), and Client::SetDestiny().
|
inline |
Definition at line 156 of file DestinyManager.h.
References Destiny::Ball::Mode::FOLLOW, and m_ballMode.
Referenced by NPCAIMgr::SetChasing(), and NPCAIMgr::SetFollowing().

|
inline |
|
inline |
Definition at line 153 of file DestinyManager.h.
References Destiny::Ball::Mode::GOTO, and m_ballMode.
Referenced by NPCAIMgr::SetChasing(), and NPCAIMgr::SetFollowing().

|
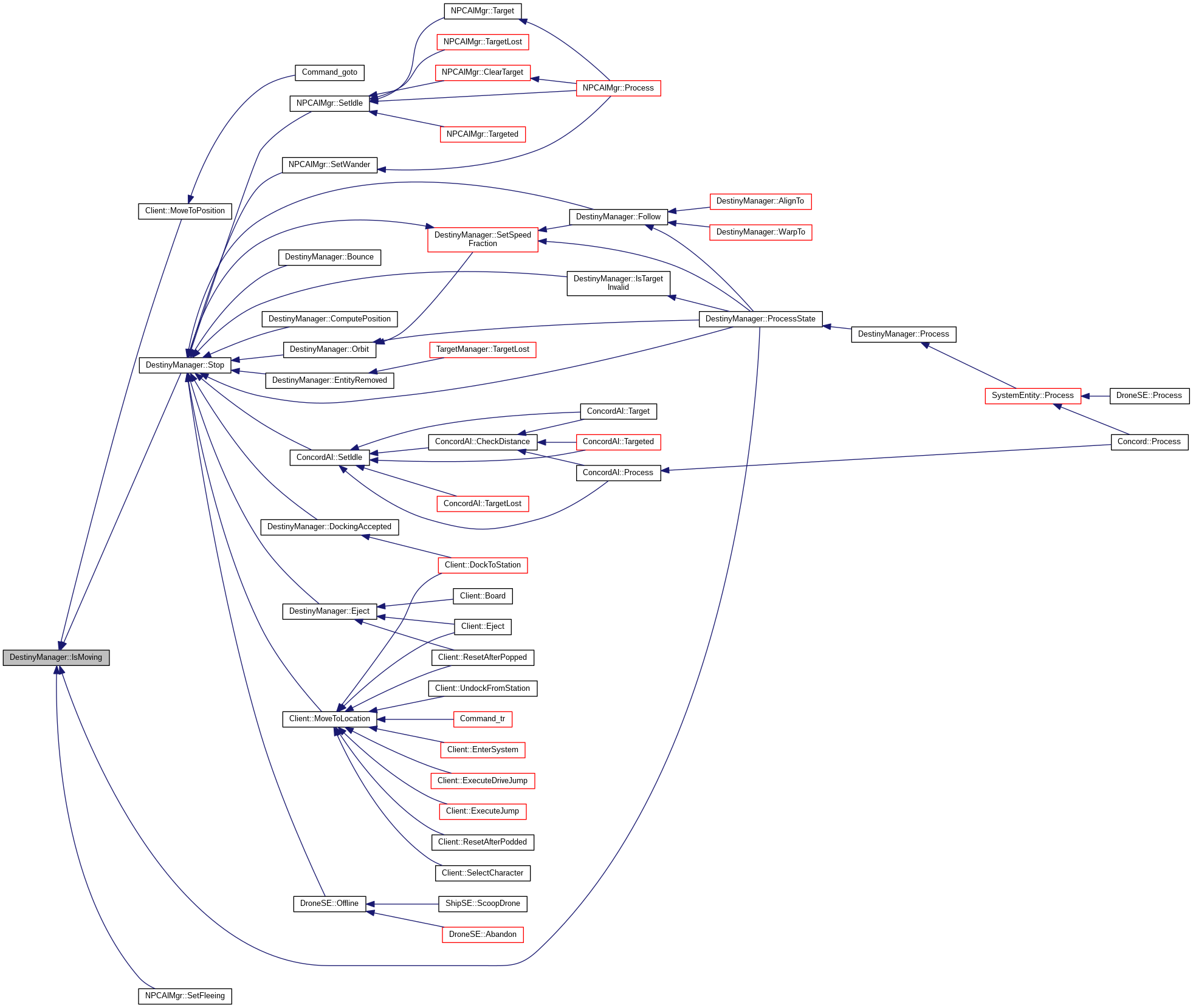
inline |
Definition at line 149 of file DestinyManager.h.
References m_currentSpeedFraction.
Referenced by Client::MoveToPosition(), ProcessState(), NPCAIMgr::SetFleeing(), and Stop().
|
inline |
Definition at line 155 of file DestinyManager.h.
References m_ballMode, and Destiny::Ball::Mode::ORBIT.
Referenced by NPCAIMgr::SetEngaged(), and NPCAIMgr::SetSignaling().

|
inline |
Definition at line 154 of file DestinyManager.h.
References m_ballMode, and Destiny::Ball::Mode::STOP.
|
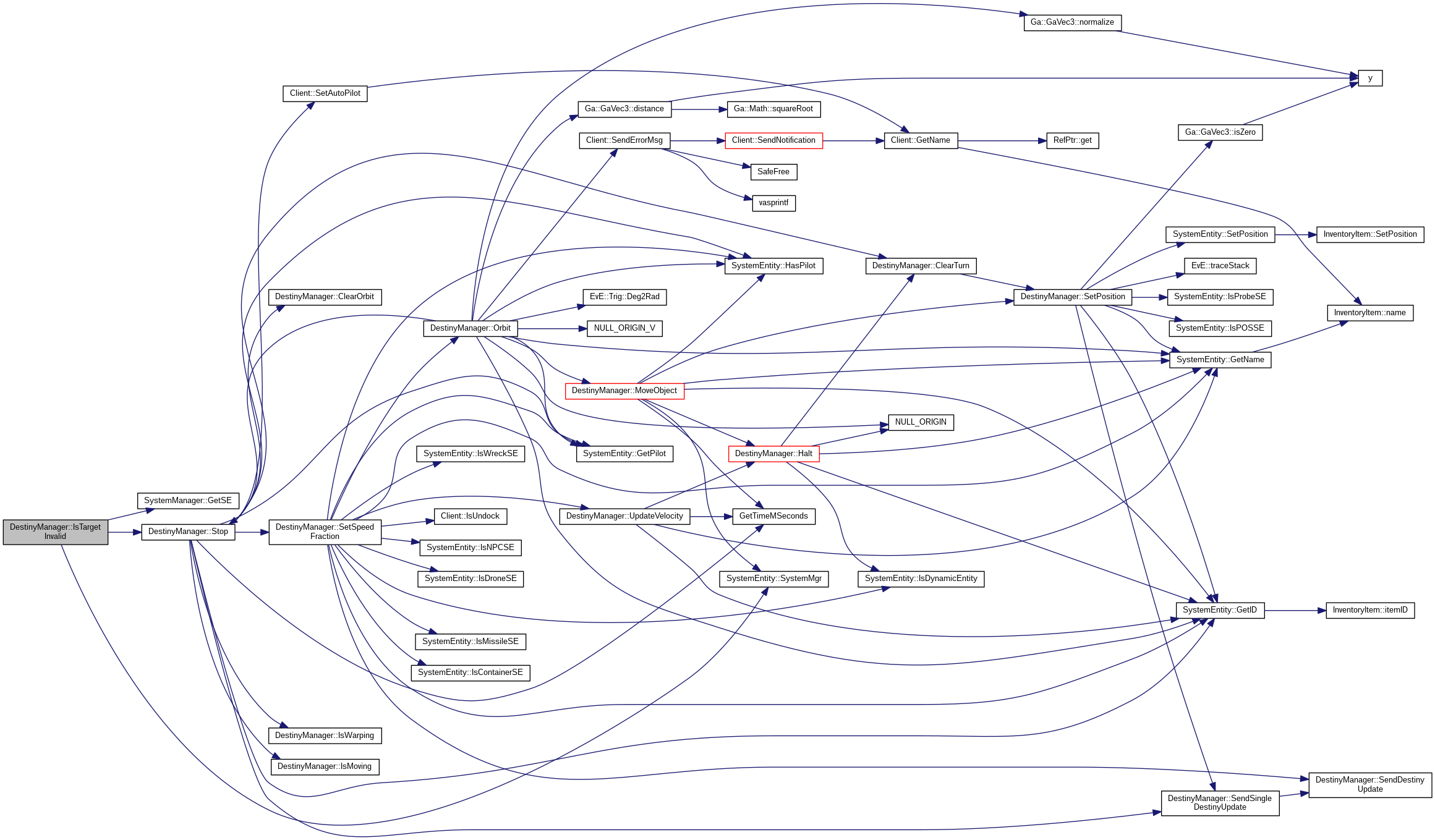
protected |
Definition at line 1713 of file DestinyManager.cpp.
References SystemManager::GetSE(), m_targetEntity, mySE, Stop(), and SystemEntity::SystemMgr().
Referenced by ProcessState().
|
inline |
Definition at line 161 of file DestinyManager.h.
References m_tractored.
Referenced by ModuleManager::Activate().

|
private |
Definition at line 915 of file DestinyManager.cpp.
References _log, ClearTurn(), Ga::GaVec3::dotProduct(), SystemEntity::GetID(), SystemEntity::GetName(), Halt(), is_log_enabled, Ga::GaVec3::isZero(), m_activeSpeedFraction, m_currentSpeedFraction, m_position, m_radians, m_shipHeading, m_targetHeading, m_targetPoint, mySE, Ga::GaVec3::normalize(), EvE::Trig::Rad2Deg(), sLog, TURN_ALIGNMENT, Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by Turn().
|
inline |
|
inline |
Definition at line 158 of file DestinyManager.h.
References m_warpState.
Referenced by ModuleManager::Activate(), Command_destinyvars(), NPCAIMgr::Process(), ConcordAI::Process(), SystemBubble::ProcessWander(), ActiveModule::ShowEffect(), and Stop().
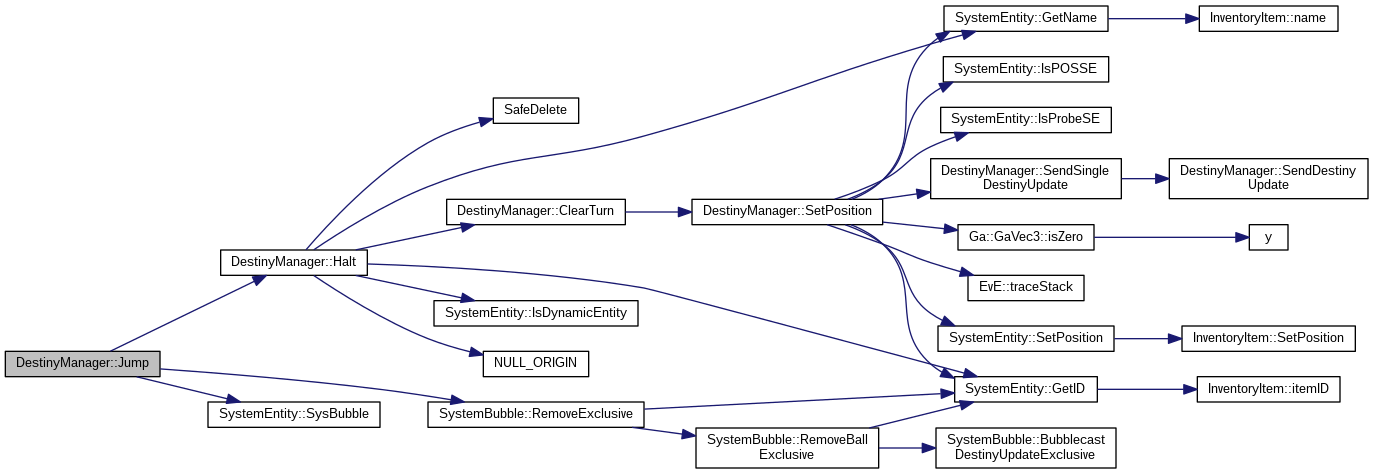
| void DestinyManager::Jump | ( | bool | showCloak = true | ) |
Definition at line 2666 of file DestinyManager.cpp.
References Halt(), m_cloaked, mySE, SystemBubble::RemoveExclusive(), and SystemEntity::SysBubble().
Referenced by ShipSE::Jump().

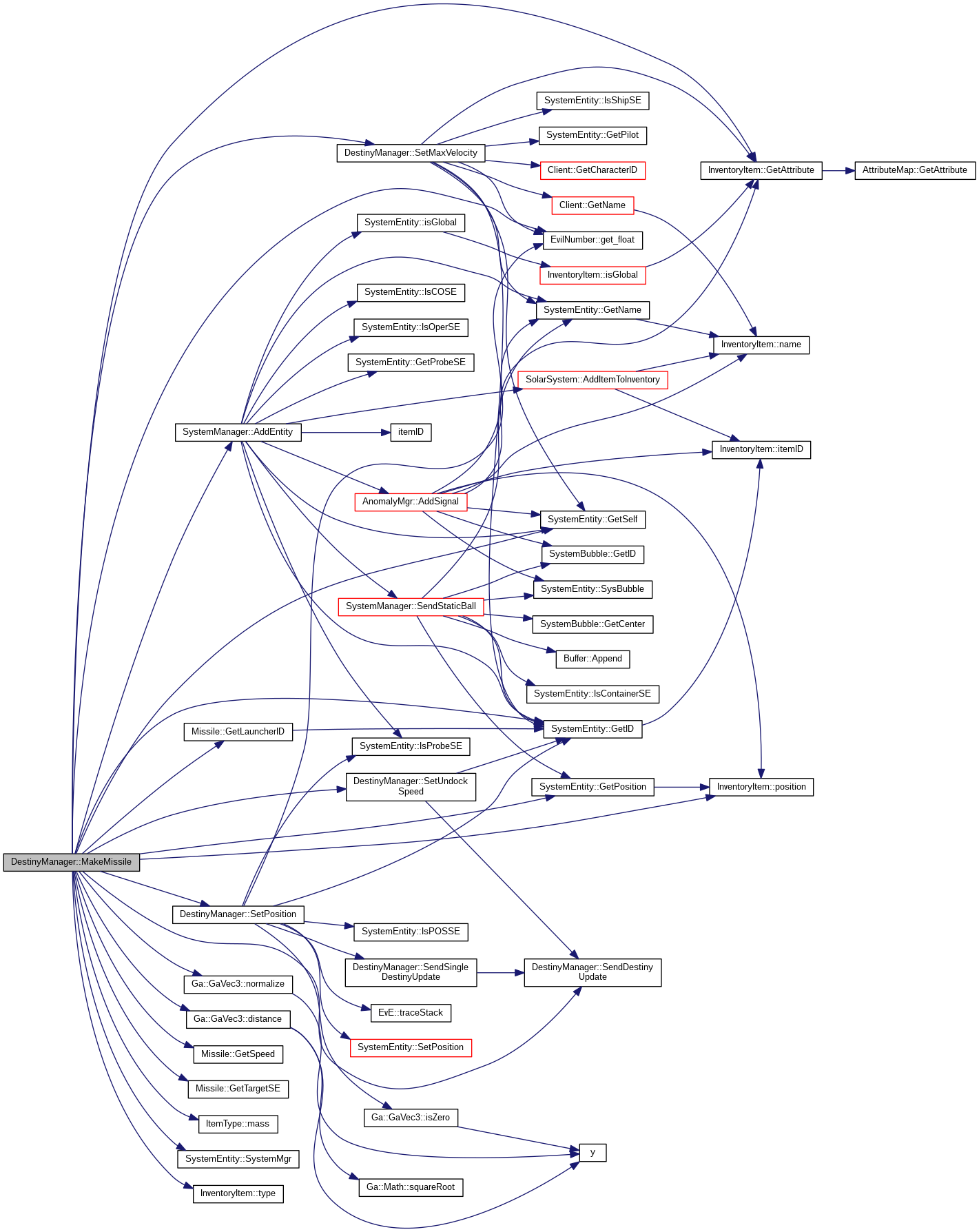
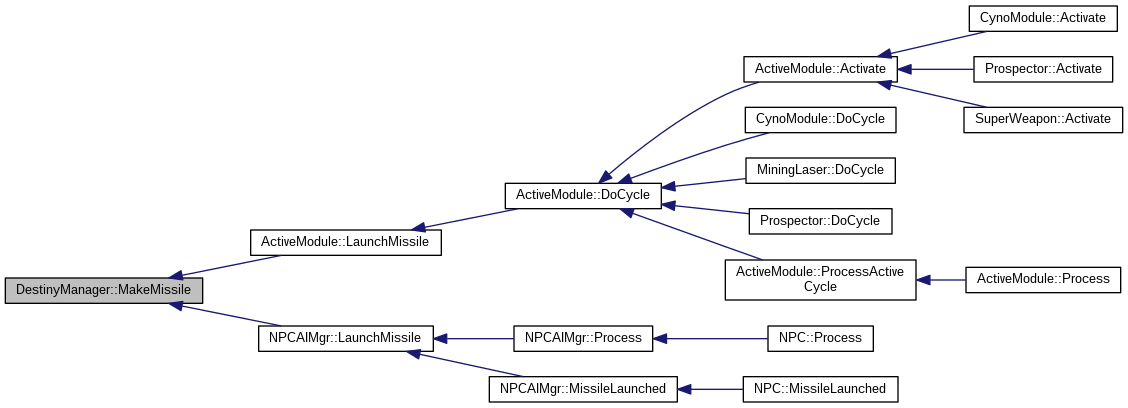
| void DestinyManager::MakeMissile | ( | Missile * | missile | ) |
Definition at line 2557 of file DestinyManager.cpp.
References SystemManager::AddEntity(), AttrInetia, Ga::GaVec3::distance(), EvilNumber::get_float(), InventoryItem::GetAttribute(), SystemEntity::GetID(), Missile::GetLauncherID(), SystemEntity::GetPosition(), SystemEntity::GetSelf(), Missile::GetSpeed(), Missile::GetTargetSE(), m_ballMode, m_mass, m_massMKg, m_maxShipSpeed, m_position, m_shipAgility, m_shipHeading, m_shipInertia, m_stateStamp, m_stop, m_targetDistance, m_targetEntity, m_targetPoint, ItemType::mass(), Destiny::Ball::Mode::MISSILE, mySE, Ga::GaVec3::normalize(), InventoryItem::position(), SendDestinyUpdate(), sEntityList, SetMaxVelocity(), SetPosition(), SetUndockSpeed(), SystemEntity::SystemMgr(), and InventoryItem::type().
Referenced by ActiveModule::LaunchMissile(), and NPCAIMgr::LaunchMissile().
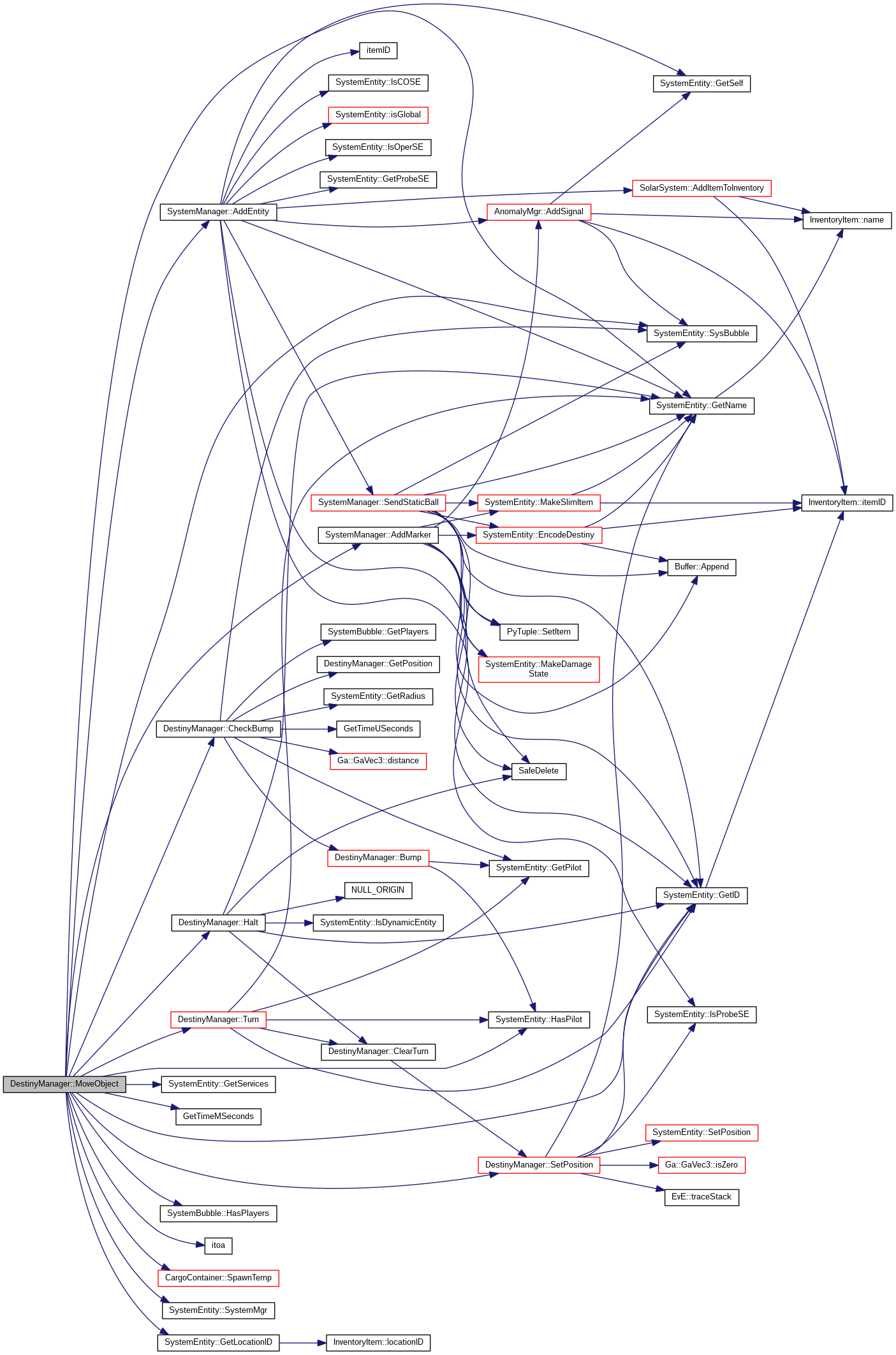
|
protected |
Definition at line 698 of file DestinyManager.cpp.
References _log, SystemManager::AddEntity(), SystemManager::AddMarker(), CheckBump(), Destiny::Ball::Orbit::Far, flagNone, SystemEntity::GetID(), SystemEntity::GetLocationID(), SystemEntity::GetName(), SystemEntity::GetServices(), GetTimeMSeconds(), Halt(), SystemEntity::HasPilot(), SystemBubble::HasPlayers(), is_log_enabled, itoa(), m_accel, m_activeSpeedFraction, m_changeDelay, m_currentSpeedFraction, m_decel, m_maxOrbitSpeedFraction, m_maxSpeed, m_moveTime, m_orbiting, m_position, m_prevSpeed, m_prevSpeedFraction, m_shipAgility, m_shipHeading, m_shipMaxAccelTime, m_stateStamp, m_stop, m_tractored, m_tractorPause, m_turning, m_turnTic, m_userSpeedFraction, m_velocity, mySE, ownerSystem, sConfig, sEntityList, SetPosition(), CargoContainer::SpawnTemp(), SystemEntity::SysBubble(), SystemEntity::SystemMgr(), Destiny::Ball::Orbit::TooClose, Turn(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by BeginMovement(), Follow(), Orbit(), and ProcessState().
| void DestinyManager::Orbit | ( | SystemEntity * | pSE, |
| uint32 | distance = 0 |
||
| ) |
Definition at line 2078 of file DestinyManager.cpp.
References _log, AttrMass, BeginMovement(), SystemEntity::DestinyMgr(), EvilNumber::get_float(), InventoryItem::GetAttribute(), SystemEntity::GetID(), SystemEntity::GetName(), SystemEntity::GetPosition(), SystemEntity::GetRadius(), SystemEntity::GetSelf(), GetSpeed(), is_log_enabled, m_ballMode, m_followDistance, m_massMKg, m_maxOrbitSpeedFraction, m_maxShipSpeed, m_orbiting, m_orbitRadTic, m_orbitTime, m_radius, m_shipAgility, m_shipHeading, m_shipInertia, m_targetDistance, m_targetEntity, m_targetPoint, ItemType::mass(), mySE, NULL_ORIGIN_V(), Destiny::Ball::Mode::ORBIT, Destiny::Ball::Orbit::Orbiting, EvE::Trig::Pi2, SendSingleDestinyUpdate(), and InventoryItem::type().
Referenced by DroneSE::IdleOrbit(), DroneAIMgr::SetEngaged(), NPCAIMgr::SetEngaged(), ConcordAI::SetEngaged(), NPCAIMgr::SetSignaling(), ConcordAI::SetSignaling(), and NPCAIMgr::SetWander().
|
protected |
Definition at line 1172 of file DestinyManager.cpp.
References _log, BUBBLE_RADIUS_METERS, Destiny::Ball::Orbit::Close, EvE::Trig::Deg2Rad(), Ga::GaVec3::distance(), Destiny::Ball::Orbit::Far, SystemEntity::GetID(), SystemEntity::GetName(), SystemEntity::GetPilot(), SystemEntity::HasPilot(), is_log_enabled, LogMacro, m_activeSpeedFraction, m_followDistance, m_maxOrbitSpeedFraction, m_maxSpeed, m_orbiting, m_orbitRadTic, m_orbitTime, m_position, m_radius, m_shipHeading, m_stateStamp, m_targetDistance, m_targetEntity, m_targetPoint, MoveObject(), mySE, Ga::GaVec3::normalize(), NULL_ORIGIN(), NULL_ORIGIN_V(), Destiny::Ball::Orbit::Orbiting, EvE::Trig::Pi2, Client::SendErrorMsg(), sEntityList, sLog, Stop(), Destiny::Ball::Orbit::TooClose, Destiny::Ball::Orbit::TooFar, Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by ProcessState(), and SetSpeedFraction().
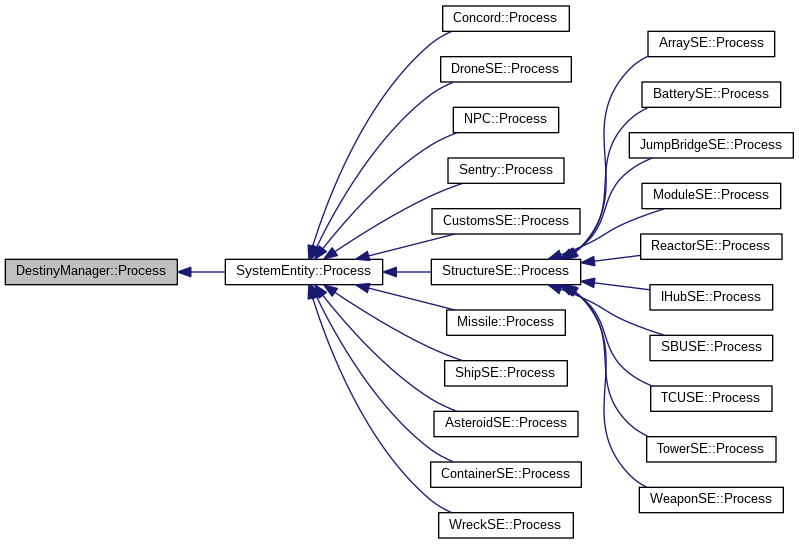
| void DestinyManager::Process | ( | ) |
Definition at line 125 of file DestinyManager.cpp.
References Profile::destiny, GetTimeUSeconds(), Halt(), SystemEntity::IsFrozen(), mySE, ProcessState(), sConfig, and sProfiler.
Referenced by SystemEntity::Process().
|
protected |
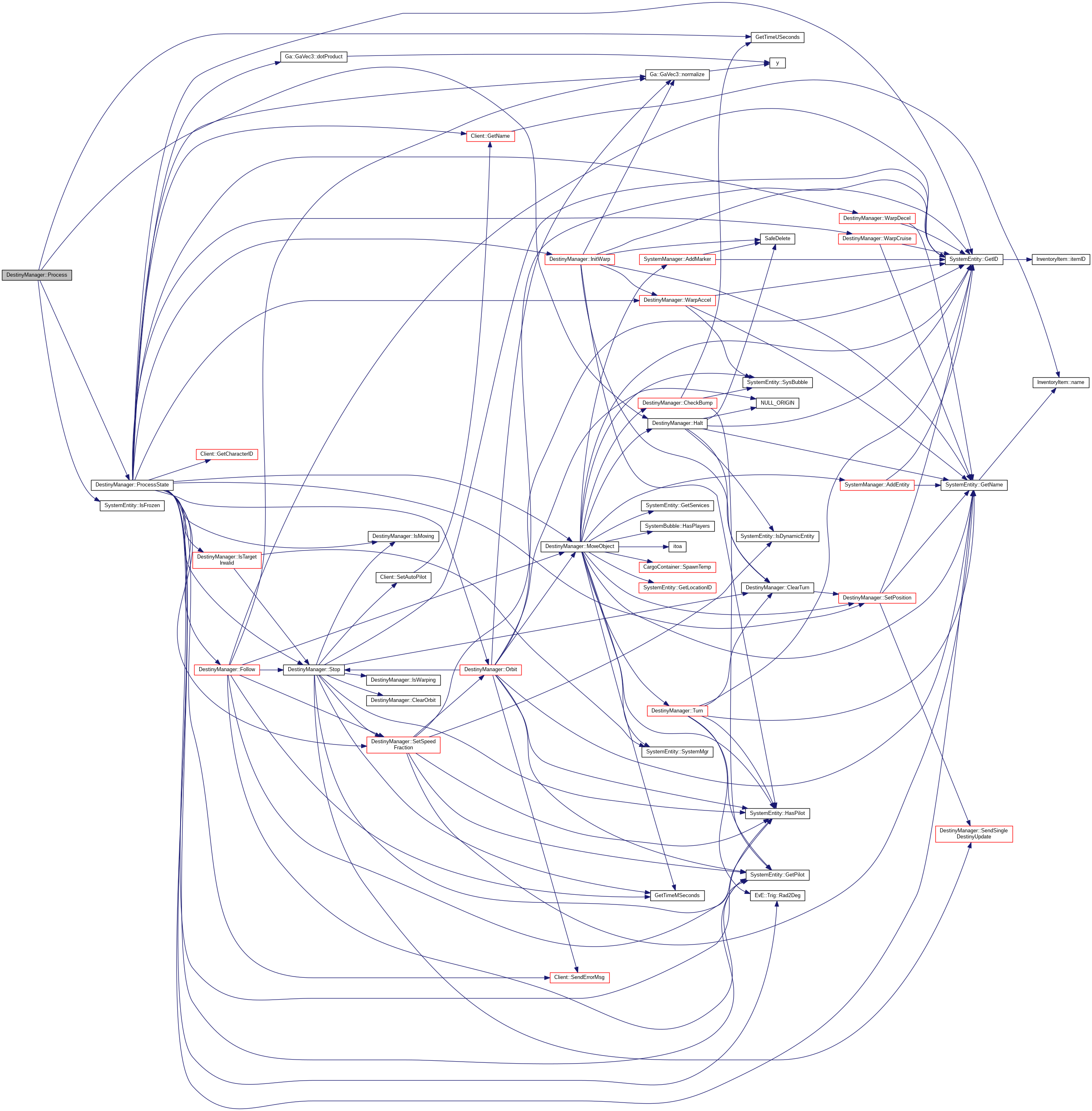
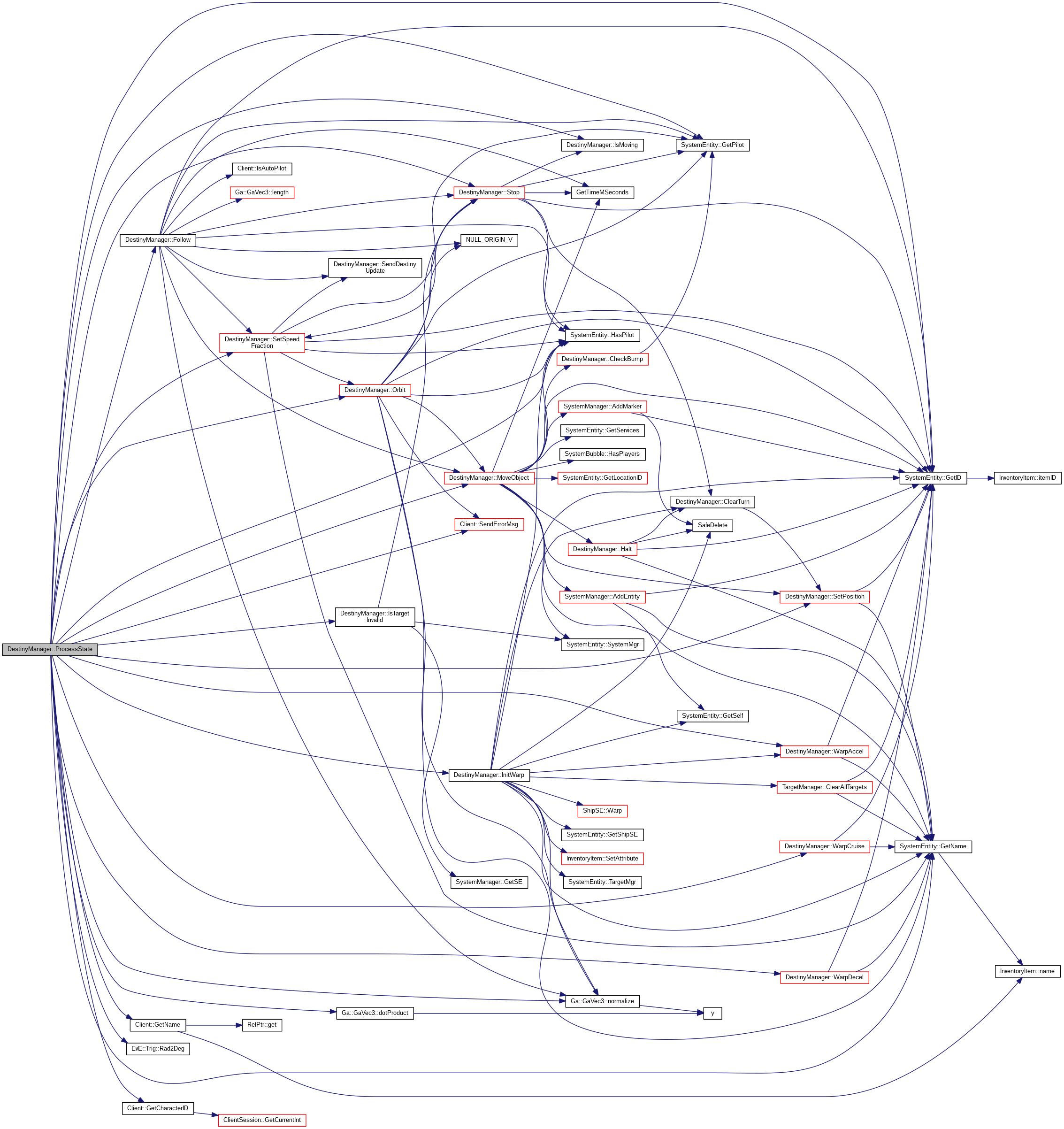
Definition at line 139 of file DestinyManager.cpp.
References _log, DestinyManager::WarpState::accel, Destiny::Ball::Mode::BOID, DestinyManager::WarpState::cruise, DestinyManager::WarpState::decel, Ga::GaVec3::dotProduct(), Destiny::Ball::Mode::FIELD, Destiny::Ball::Mode::FOLLOW, Follow(), Destiny::Ball::Mode::FORMATION, Client::GetCharacterID(), SystemEntity::GetID(), Client::GetName(), SystemEntity::GetName(), SystemEntity::GetPilot(), Destiny::Ball::Mode::GOTO, SystemEntity::HasPilot(), InitWarp(), IsMoving(), IsTargetInvalid(), m_ballMode, m_currentSpeedFraction, m_maxSpeed, m_position, m_shipHeading, m_stateStamp, m_targetPoint, m_timeToEnterWarp, m_userSpeedFraction, m_velocity, m_warpState, Destiny::Ball::Mode::MINIBALL, Destiny::Ball::Mode::MISSILE, MoveObject(), Destiny::Ball::Mode::MUSHROOM, mySE, Ga::GaVec3::normalize(), Destiny::Ball::Mode::ORBIT, Orbit(), EvE::Trig::Rad2Deg(), Destiny::Ball::Mode::RIGID, Client::SendErrorMsg(), sEntityList, SetPosition(), SetSpeedFraction(), Destiny::Ball::Mode::STOP, Stop(), Destiny::Ball::Mode::TROLL, Destiny::Ball::Mode::WARP, WARP_ALIGNMENT, WarpAccel(), WarpCruise(), and WarpDecel().
Referenced by Process().
| void DestinyManager::SendAnchorDrop | ( | ) | const |
Definition at line 2818 of file DestinyManager.cpp.
References GetFileTimeNow(), SystemEntity::GetID(), SystemEntity::GetTypeID(), mySE, and SendSingleDestinyUpdate().
| void DestinyManager::SendAnchorLift | ( | ) | const |
Definition at line 2832 of file DestinyManager.cpp.
References GetFileTimeNow(), SystemEntity::GetID(), SystemEntity::GetTypeID(), mySE, and SendSingleDestinyUpdate().
| void DestinyManager::SendBallInteractive | ( | const ShipItemRef | shipRef, |
| bool | set = false |
||
| ) | const |
Definition at line 2998 of file DestinyManager.cpp.
References InventoryItem::itemID(), and SendSingleDestinyUpdate().
Referenced by UpdateNewShip(), and UpdateOldShip().

| void DestinyManager::SendCloakFx | ( | bool | apply = false, |
| bool | module = false |
||
| ) | const |
Definition at line 2884 of file DestinyManager.cpp.
References SystemEntity::GetID(), mySE, and SendSingleDestinyUpdate().
Referenced by Cloak(), and UnCloak().

| void DestinyManager::SendDestinyUpdate | ( | std::vector< PyTuple * > & | updates, |
| bool | self_only = false |
||
| ) | const |
Definition at line 3098 of file DestinyManager.cpp.
Referenced by BeginMovement(), Bounce(), Follow(), MakeMissile(), SendJumpInEffect(), SendJumpOutEffect(), SendSingleDestinyEvent(), SendSingleDestinyUpdate(), CustomsSE::SetAnchor(), StructureSE::SetAnchor(), SetSpeedFraction(), SetUndockSpeed(), SpeedBoost(), TractorBeamStart(), TractorBeamStop(), UpdateNewShip(), TowerSE::UpdatePassword(), UpdateShipVariables(), WarpTo(), and WebbedMe().
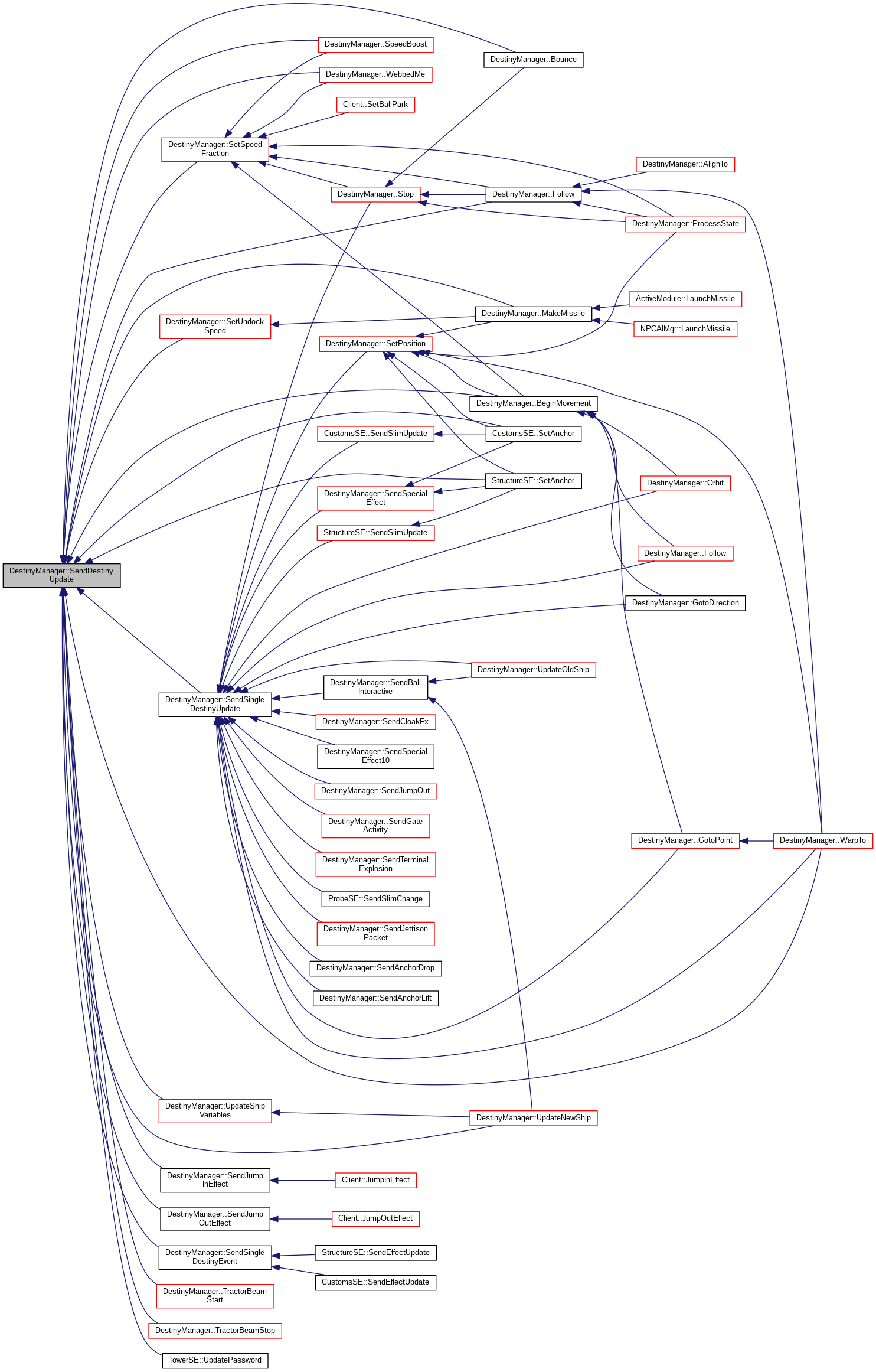
| void DestinyManager::SendDestinyUpdate | ( | std::vector< PyTuple * > & | updates, |
| std::vector< PyTuple * > & | events, | ||
| bool | self_only = false |
||
| ) | const |
Definition at line 3103 of file DestinyManager.cpp.
References _log, SystemBubble::BubblecastDestiny(), Client::GetCharacterID(), Client::GetCharID(), SystemManager::GetClientList(), SystemBubble::GetID(), SystemEntity::GetID(), Client::GetName(), SystemEntity::GetName(), SystemEntity::GetPilot(), SystemEntity::HasPilot(), is_log_enabled, SystemManager::IsLoaded(), SystemEntity::IsOperSE(), mySE, PyIncRef, Client::QueueDestinyEvent(), Client::QueueDestinyUpdate(), sConfig, sEntityList, SystemEntity::SysBubble(), SystemEntity::SystemMgr(), and EvE::traceStack().
| void DestinyManager::SendGateActivity | ( | uint32 | gateID | ) | const |
Definition at line 2987 of file DestinyManager.cpp.
References SendSingleDestinyUpdate().
Referenced by Client::StargateJump().


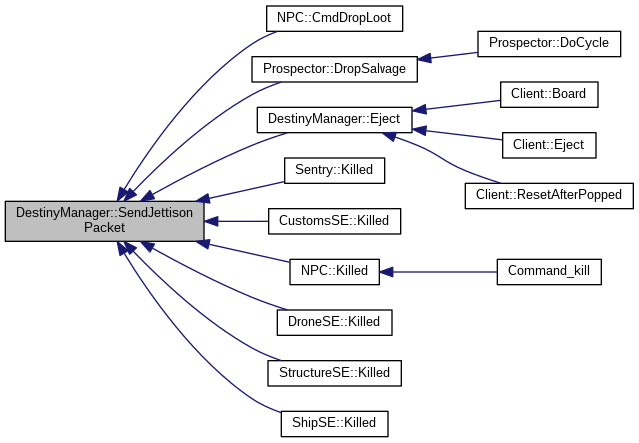
| void DestinyManager::SendJettisonPacket | ( | ) | const |
Definition at line 2787 of file DestinyManager.cpp.
References SystemEntity::GetID(), mySE, and SendSingleDestinyUpdate().
Referenced by NPC::CmdDropLoot(), Prospector::DropSalvage(), Eject(), Sentry::Killed(), CustomsSE::Killed(), NPC::Killed(), DroneSE::Killed(), StructureSE::Killed(), and ShipSE::Killed().

| void DestinyManager::SendJumpInEffect | ( | std::string | JumpEffect | ) | const |
Definition at line 3023 of file DestinyManager.cpp.
References SystemEntity::GetID(), mySE, and SendDestinyUpdate().
Referenced by Client::JumpInEffect().


| void DestinyManager::SendJumpOut | ( | uint32 | gateID | ) | const |
Definition at line 2975 of file DestinyManager.cpp.
References SystemEntity::GetID(), mySE, and SendSingleDestinyUpdate().
Referenced by Client::StargateJump().


| void DestinyManager::SendJumpOutEffect | ( | std::string | JumpEffect, |
| uint32 | locationID | ||
| ) | const |
Definition at line 3007 of file DestinyManager.cpp.
References SystemEntity::GetID(), mySE, and SendDestinyUpdate().
Referenced by Client::JumpOutEffect().


| void DestinyManager::SendSetState | ( | ) | const |
Definition at line 3066 of file DestinyManager.cpp.
References _log, Client::GetCharacterID(), SystemEntity::GetID(), Client::GetName(), SystemEntity::GetName(), SystemEntity::GetPilot(), SystemEntity::HasPilot(), is_log_enabled, SystemManager::MakeSetState(), mySE, Client::QueueDestinyUpdate(), sEntityList, SetState(), Client::SetStateSent(), SystemEntity::SysBubble(), and SystemEntity::SystemMgr().
Referenced by Command_sendstate(), Command_update(), and Client::SetBallPark().
| void DestinyManager::SendSingleDestinyEvent | ( | PyTuple ** | ev, |
| bool | self_only = false |
||
| ) | const |
Definition at line 3085 of file DestinyManager.cpp.
References SendDestinyUpdate().
Referenced by CustomsSE::SendEffectUpdate(), and StructureSE::SendEffectUpdate().


| void DestinyManager::SendSingleDestinyUpdate | ( | PyTuple ** | up, |
| bool | self_only = false |
||
| ) | const |
Definition at line 3092 of file DestinyManager.cpp.
References SendDestinyUpdate().
Referenced by Follow(), GotoDirection(), GotoPoint(), Orbit(), SendAnchorDrop(), SendAnchorLift(), SendBallInteractive(), SendCloakFx(), SendGateActivity(), SendJettisonPacket(), SendJumpOut(), ProbeSE::SendSlimChange(), CustomsSE::SendSlimUpdate(), StructureSE::SendSlimUpdate(), SendSpecialEffect(), SendSpecialEffect10(), SendTerminalExplosion(), SetPosition(), Stop(), UpdateOldShip(), and WarpTo().

| void DestinyManager::SendSpecialEffect | ( | uint32 | entityID, |
| uint32 | moduleID, | ||
| uint32 | moduleTypeID, | ||
| uint32 | targetID, | ||
| uint32 | chargeTypeID, | ||
| std::string | guid, | ||
| bool | isOffensive, | ||
| bool | start, | ||
| bool | isActive, | ||
| int32 | duration, | ||
| uint32 | repeat, | ||
| int32 | graphicInfo = 0 |
||
| ) | const |
Definition at line 2932 of file DestinyManager.cpp.
References GetFileTimeNow(), PyStatic, and SendSingleDestinyUpdate().
Referenced by StructureSE::Activate(), SentryAI::AttackTarget(), DroneAIMgr::AttackTarget(), NPCAIMgr::AttackTarget(), ConcordAI::AttackTarget(), StructureSE::Process(), CustomsSE::PullAnchor(), StructureSE::PullAnchor(), CustomsSE::SetAnchor(), StructureSE::SetAnchor(), TowerSE::SetOnline(), StructureSE::SetOnline(), and ActiveModule::ShowEffect().

| void DestinyManager::SendSpecialEffect10 | ( | uint32 | entityID, |
| uint32 | targetID, | ||
| std::string | guid, | ||
| bool | isOffensive, | ||
| bool | start, | ||
| bool | isActive | ||
| ) | const |
Definition at line 2916 of file DestinyManager.cpp.
References SendSingleDestinyUpdate().

| void DestinyManager::SendTerminalExplosion | ( | uint32 | shipID, |
| uint32 | bubbleID, | ||
| bool | isGlobal = false |
||
| ) | const |
Definition at line 3045 of file DestinyManager.cpp.
References SendSingleDestinyUpdate().
Referenced by SystemEntity::ApplyDamage().


|
inline |
|
inline |
|
inline |
Definition at line 216 of file DestinyManager.h.
References m_frozen.
Referenced by CynoModule::Activate(), and CynoModule::DeactivateCycle().
| void DestinyManager::SetMaxVelocity | ( | float | maxVelocity | ) |
Definition at line 2336 of file DestinyManager.cpp.
References _log, AttrMaxDirectionalVelocity, AttrMaxVelocity, EvilNumber::get_float(), InventoryItem::GetAttribute(), Client::GetCharacterID(), SystemEntity::GetID(), Client::GetName(), SystemEntity::GetName(), SystemEntity::GetPilot(), SystemEntity::GetSelf(), is_log_enabled, SystemEntity::IsShipSE(), m_maxShipSpeed, and mySE.
Referenced by DroneSE::IdleOrbit(), MakeMissile(), DroneAIMgr::Return(), NPCAIMgr::SetChasing(), ConcordAI::SetChasing(), DroneAIMgr::SetEngaged(), NPCAIMgr::SetEngaged(), ConcordAI::SetEngaged(), NPCAIMgr::SetFleeing(), ConcordAI::SetFleeing(), NPCAIMgr::SetFollowing(), ConcordAI::SetFollowing(), NPCAIMgr::SetIdle(), ConcordAI::SetIdle(), NPCAIMgr::SetSignaling(), ConcordAI::SetSignaling(), and NPCAIMgr::SetWander().
| void DestinyManager::SetPosition | ( | const GPoint & | pt, |
| bool | update = false |
||
| ) |
Definition at line 2310 of file DestinyManager.cpp.
References _log, SystemEntity::GetID(), SystemEntity::GetName(), SystemEntity::IsPOSSE(), SystemEntity::IsProbeSE(), Ga::GaVec3::isZero(), m_position, mySE, SendSingleDestinyUpdate(), SystemEntity::SetPosition(), EvE::traceStack(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by BubbleManager::Add(), BeginMovement(), ClearTurn(), Command_syncloc(), Command_update(), MakeMissile(), MoveObject(), Client::MoveToPosition(), ProcessState(), CustomsSE::SetAnchor(), StructureSE::SetAnchor(), Client::SetDestiny(), WarpTo(), and WarpUpdate().
| void DestinyManager::SetSpeedFraction | ( | float | fraction = 1.0f, |
| bool | startMovement = false |
||
| ) |
Definition at line 255 of file DestinyManager.cpp.
References _log, SystemEntity::GetID(), SystemEntity::GetName(), SystemEntity::GetPilot(), Destiny::Ball::Mode::GOTO, SystemEntity::HasPilot(), is_log_enabled, SystemEntity::IsContainerSE(), SystemEntity::IsDroneSE(), SystemEntity::IsDynamicEntity(), SystemEntity::IsMissileSE(), SystemEntity::IsNPCSE(), Client::IsUndock(), SystemEntity::IsWreckSE(), m_accel, m_activeSpeedFraction, m_ballMode, m_currentSpeedFraction, m_decel, m_hasSentShipUpdates, m_maxSpeed, m_orbiting, m_prevSpeed, m_prevSpeedFraction, m_shipAgility, m_shipMaxAccelTime, m_stop, m_targetDistance, m_targetEntity, m_userSpeedFraction, mySE, Orbit(), SendDestinyUpdate(), Destiny::Ball::Mode::STOP, UpdateVelocity(), and Destiny::Ball::Mode::WARP.
Referenced by BeginMovement(), Follow(), DroneSE::IdleOrbit(), ProcessState(), Client::SetBallPark(), SpeedBoost(), Stop(), WarpStop(), and WebbedMe().
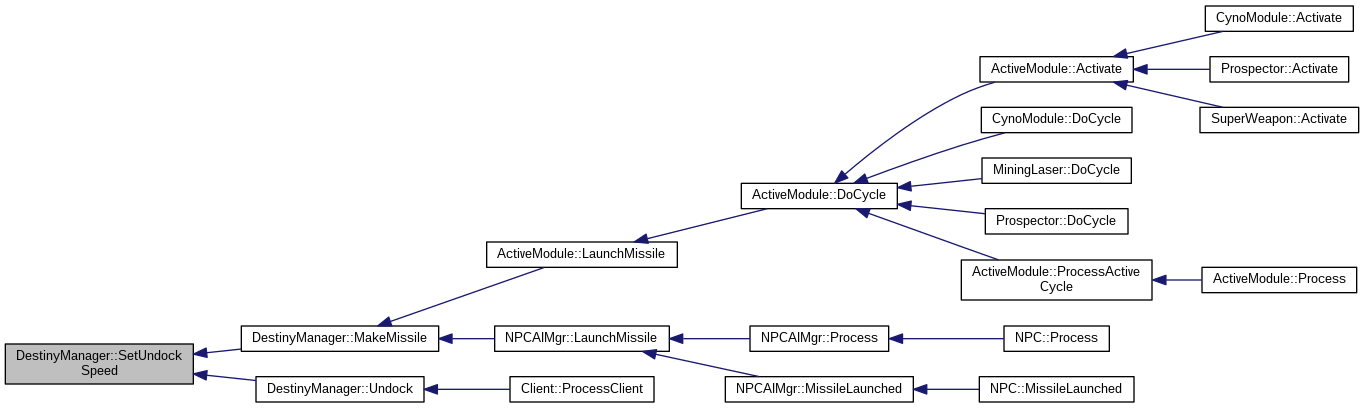
| void DestinyManager::SetUndockSpeed | ( | ) |
Definition at line 2217 of file DestinyManager.cpp.
References SystemEntity::GetID(), Destiny::Ball::Mode::GOTO, m_activeSpeedFraction, m_ballMode, m_changeDelay, m_currentSpeedFraction, m_maxShipSpeed, m_maxSpeed, m_orbiting, m_prevSpeedFraction, m_shipHeading, m_shipMaxAccelTime, m_stateStamp, m_stop, m_userSpeedFraction, m_velocity, Destiny::Ball::Mode::MISSILE, mySE, SendDestinyUpdate(), sEntityList, Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by MakeMissile(), and Undock().

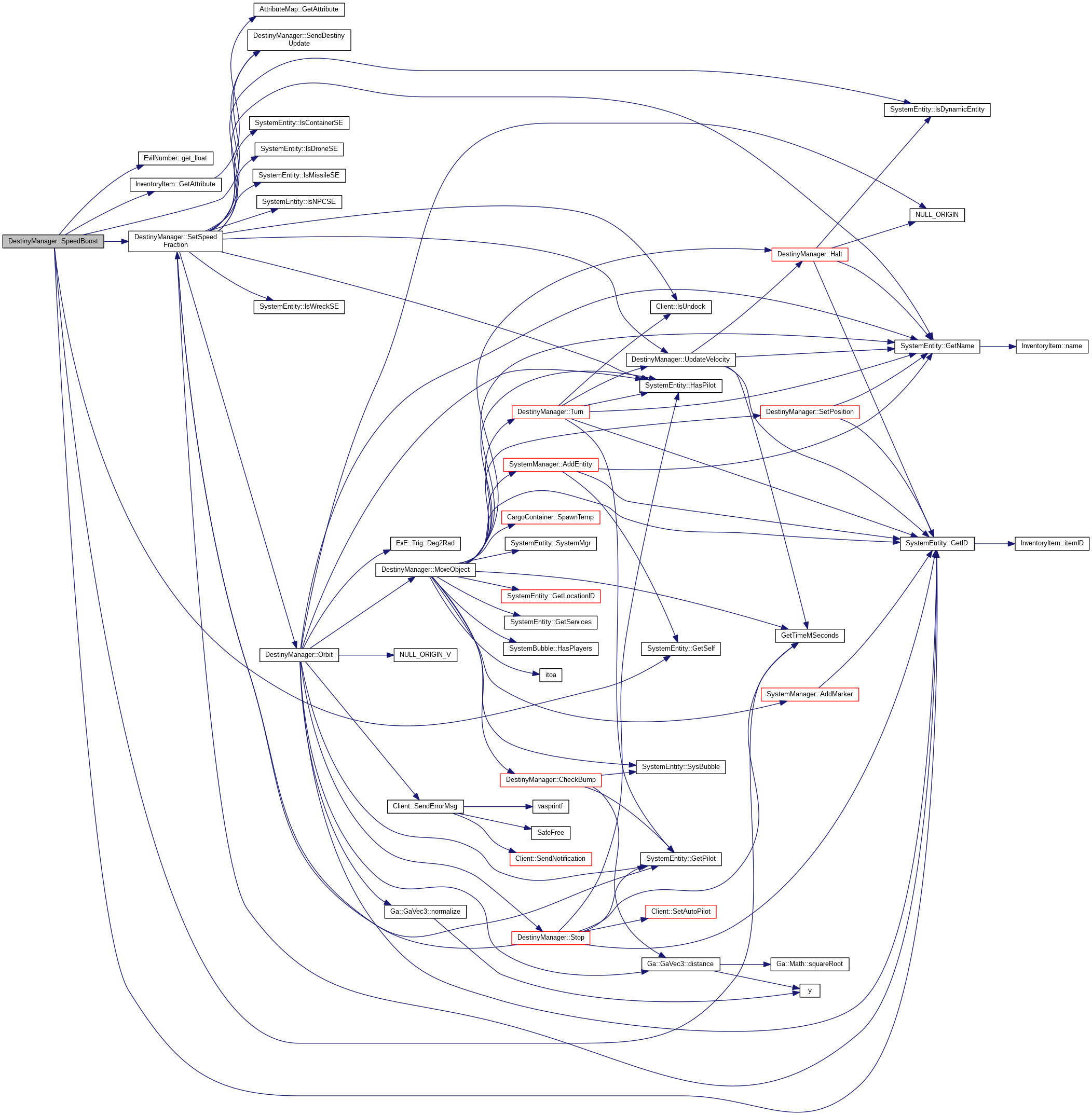
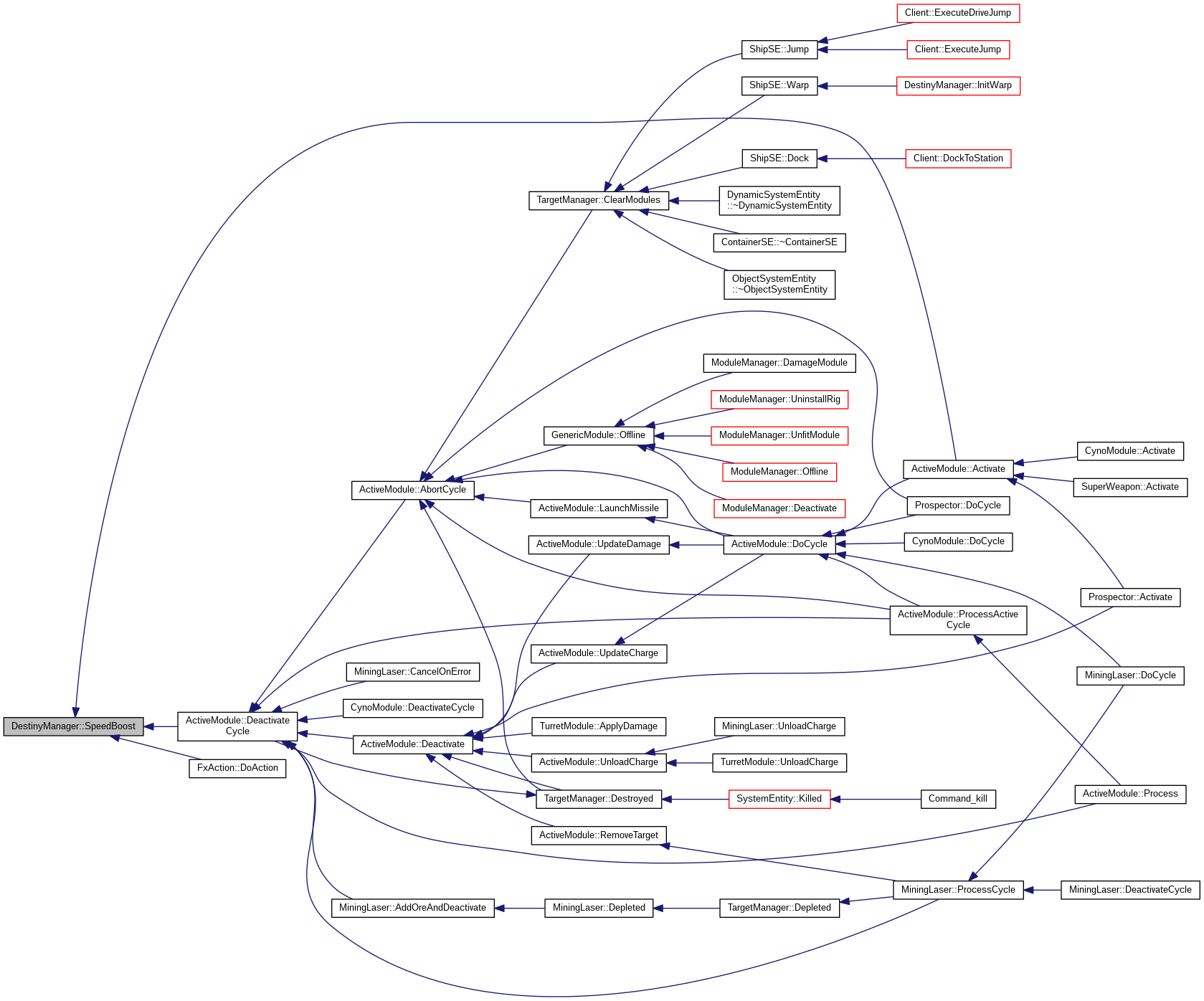
| void DestinyManager::SpeedBoost | ( | bool | deactivate = false | ) |
Definition at line 2360 of file DestinyManager.cpp.
References _log, AttrMass, AttrMaxVelocity, EvilNumber::get_float(), InventoryItem::GetAttribute(), SystemEntity::GetID(), SystemEntity::GetSelf(), GetTimeMSeconds(), is_log_enabled, m_activeSpeedFraction, m_alignTime, m_currentSpeedFraction, m_degPerTic, m_hasSentShipUpdates, m_mass, m_massMKg, m_maxShipSpeed, m_maxSpeed, m_moveTime, m_prevSpeed, m_prevSpeedFraction, m_shipAgility, m_shipInertia, m_shipMaxAccelTime, m_userSpeedFraction, mySE, SendDestinyUpdate(), and SetSpeedFraction().
Referenced by ActiveModule::Activate(), ActiveModule::DeactivateCycle(), and FxAction::DoAction().
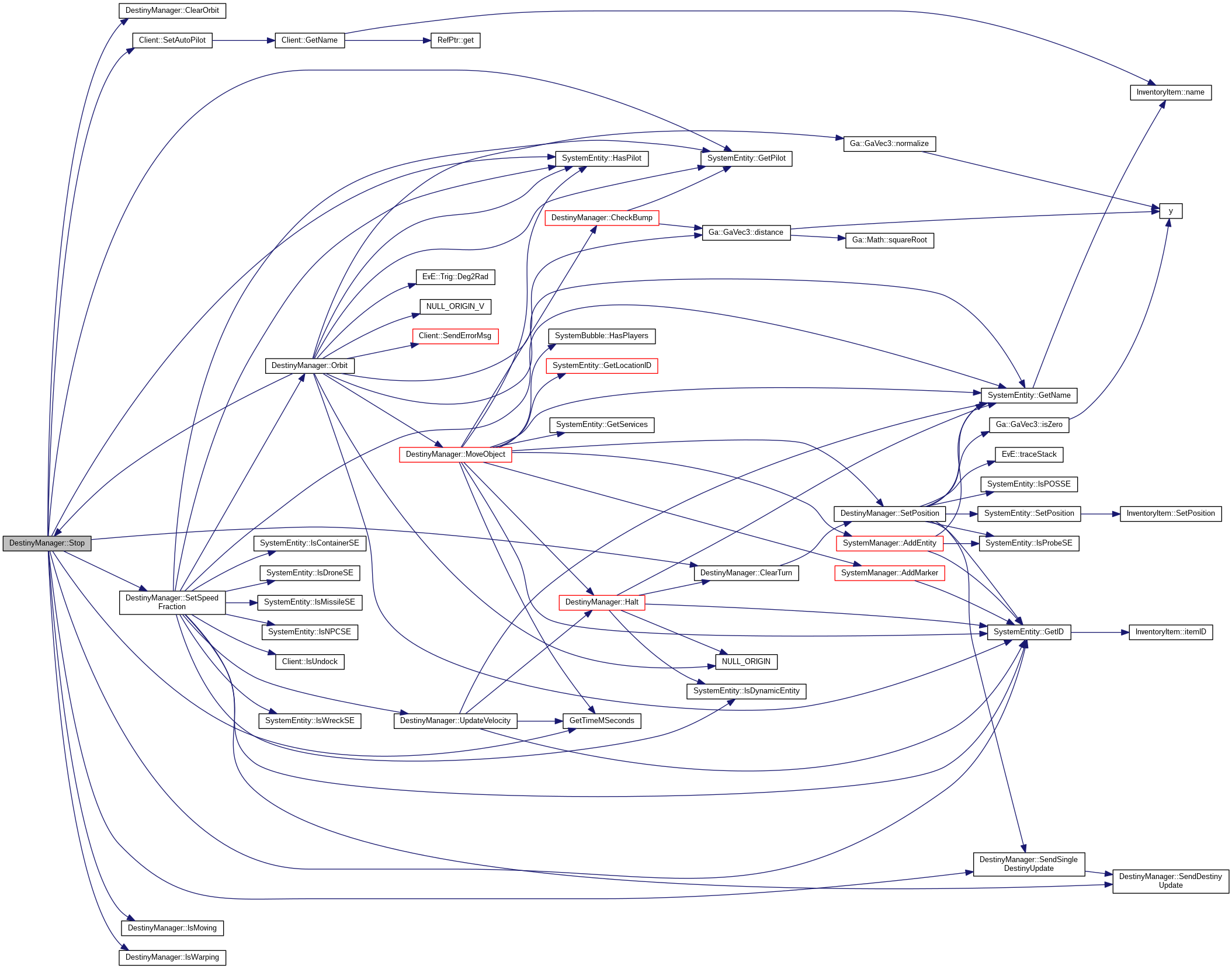
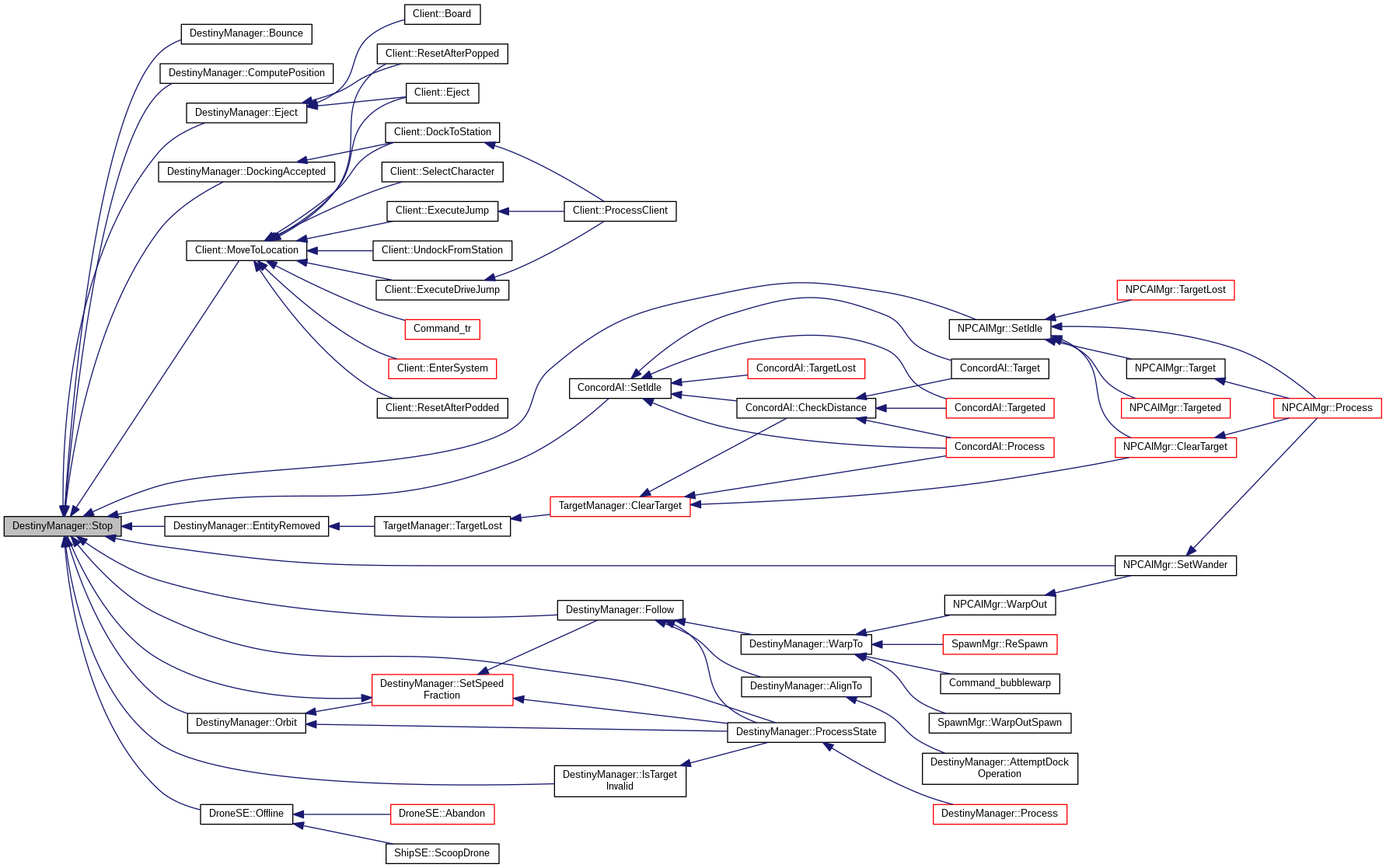
| void DestinyManager::Stop | ( | ) |
Definition at line 494 of file DestinyManager.cpp.
References ClearOrbit(), ClearTurn(), SystemEntity::GetID(), SystemEntity::GetPilot(), GetTimeMSeconds(), SystemEntity::HasPilot(), IsMoving(), IsWarping(), m_accel, m_ballMode, m_decel, m_moveTime, m_prevSpeed, m_prevSpeedFraction, m_shipAgility, m_shipMaxAccelTime, m_stateStamp, m_stop, m_userSpeedFraction, mySE, PyDecRef, SendSingleDestinyUpdate(), sEntityList, Client::SetAutoPilot(), SetSpeedFraction(), Destiny::Ball::Mode::STOP, and Destiny::Ball::Mode::WARP.
Referenced by Bounce(), ComputePosition(), DockingAccepted(), Eject(), EntityRemoved(), Follow(), IsTargetInvalid(), Client::MoveToLocation(), DroneSE::Offline(), Orbit(), ProcessState(), NPCAIMgr::SetIdle(), ConcordAI::SetIdle(), and NPCAIMgr::SetWander().
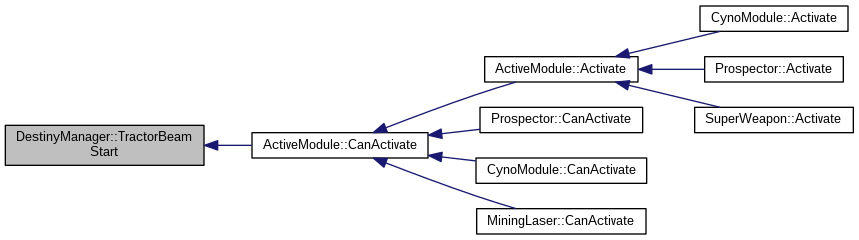
| void DestinyManager::TractorBeamStart | ( | SystemEntity * | pShipSE, |
| EvilNumber | speed | ||
| ) |
Definition at line 2694 of file DestinyManager.cpp.
References Destiny::Ball::Mode::FOLLOW, EvilNumber::get_float(), SystemEntity::GetID(), SystemEntity::GetPosition(), SystemEntity::GetRadius(), GetTimeMSeconds(), Ga::GaVec3::length(), m_accel, m_activeSpeedFraction, m_ballMode, m_currentSpeedFraction, m_decel, m_followDistance, m_maxShipSpeed, m_maxSpeed, m_moveTime, m_position, m_shipHeading, m_shipMaxAccelTime, m_stateStamp, m_stop, m_targetDistance, m_targetEntity, m_targetPoint, m_tractored, m_turning, m_userSpeedFraction, m_velocity, mySE, Ga::GaVec3::normalize(), SendDestinyUpdate(), and sEntityList.
Referenced by ActiveModule::CanActivate().
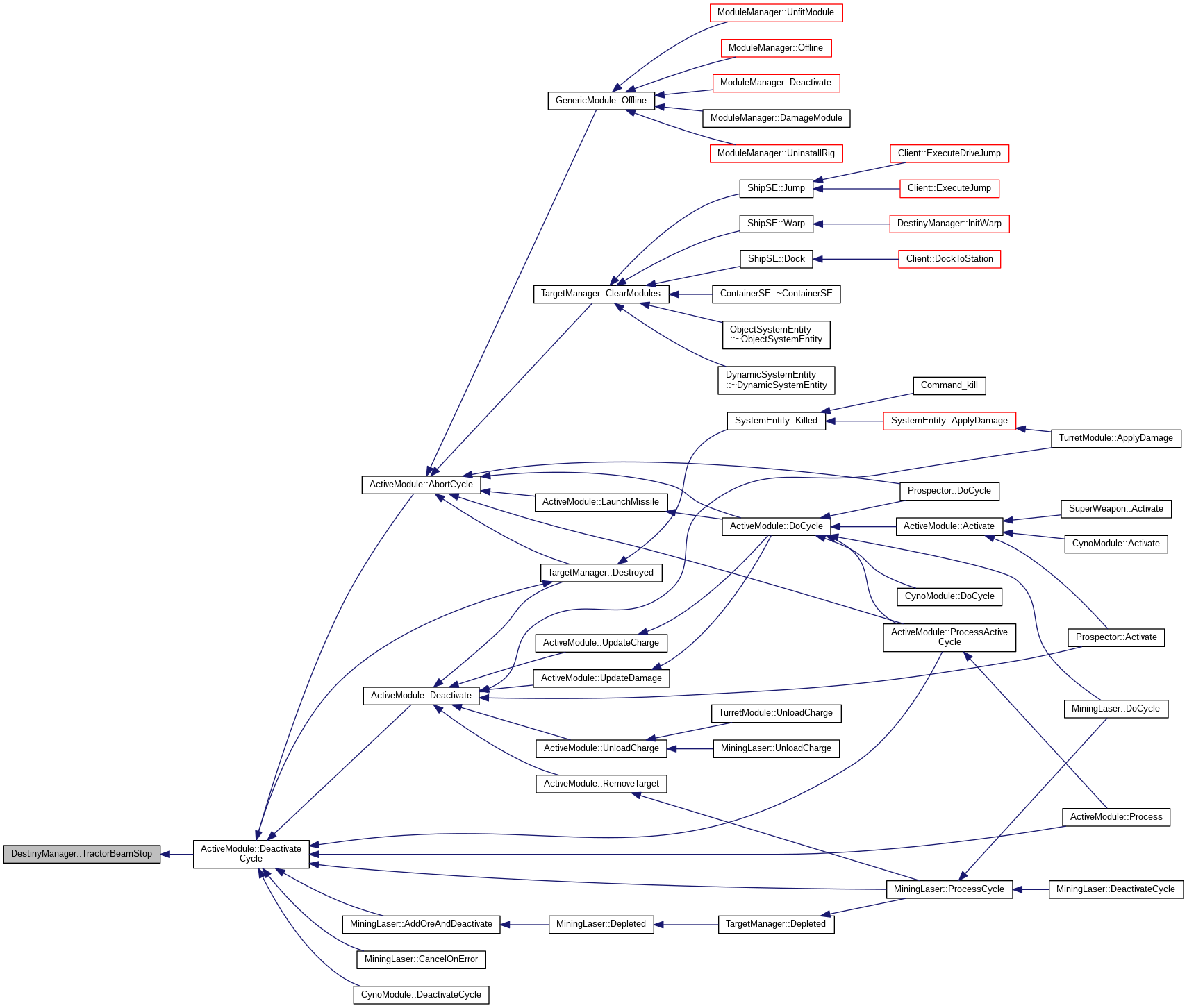
| void DestinyManager::TractorBeamStop | ( | ) |
Definition at line 2750 of file DestinyManager.cpp.
References SystemEntity::GetID(), Halt(), m_mass, m_tractored, mySE, and SendDestinyUpdate().
Referenced by ActiveModule::DeactivateCycle().
|
private |
Definition at line 998 of file DestinyManager.cpp.
References _log, ClearTurn(), SystemEntity::GetID(), SystemEntity::GetName(), SystemEntity::GetPilot(), SystemEntity::HasPilot(), is_log_enabled, IsTurn(), Client::IsUndock(), m_alignTime, m_currentSpeedFraction, m_decel, m_degPerTic, m_radians, m_shipAgility, m_shipHeading, m_shipInertia, m_targetHeading, m_turnFraction, m_turning, m_turnTic, mySE, EvE::Trig::Rad2Deg(), UpdateVelocity(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by MoveObject().
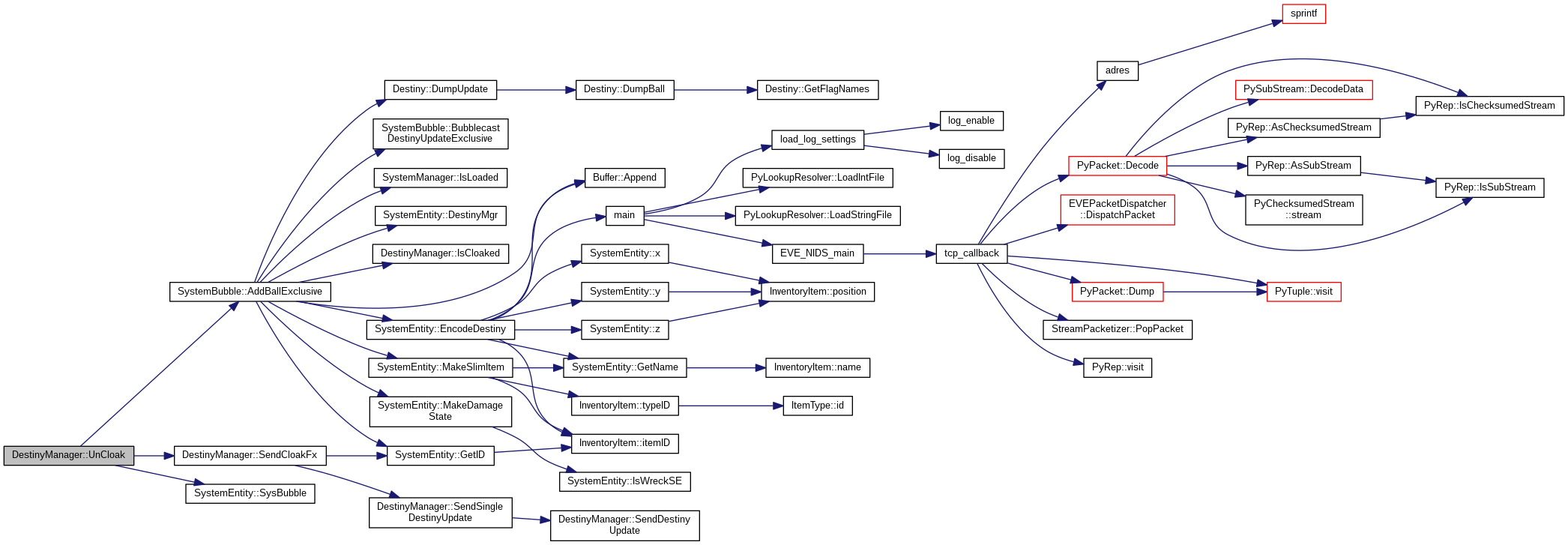
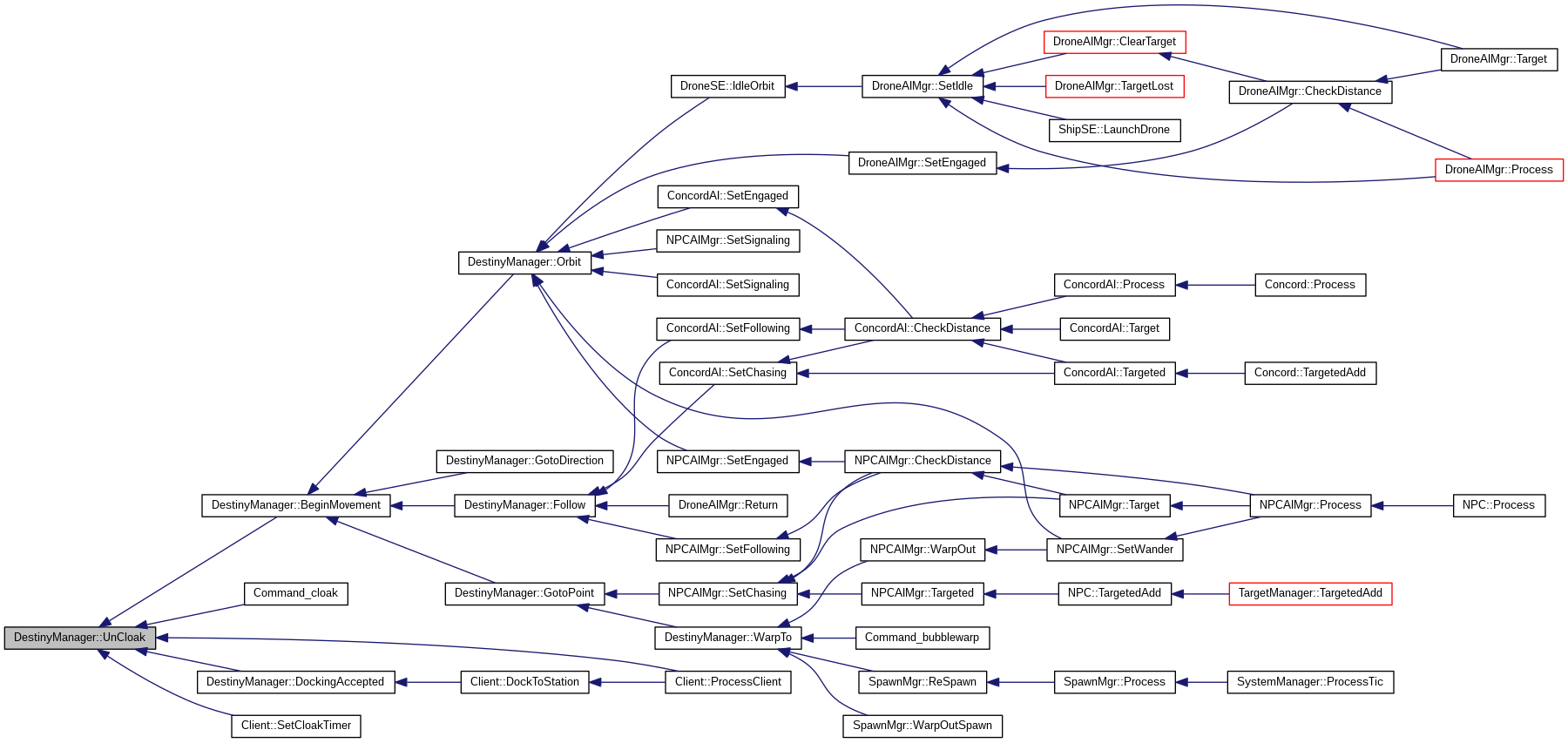
| void DestinyManager::UnCloak | ( | ) |
Definition at line 2685 of file DestinyManager.cpp.
References SystemBubble::AddBallExclusive(), m_cloaked, mySE, SendCloakFx(), and SystemEntity::SysBubble().
Referenced by BeginMovement(), Command_cloak(), DockingAccepted(), Client::ProcessClient(), and Client::SetCloakTimer().
| void DestinyManager::Undock | ( | GPoint | dir | ) |
Definition at line 2208 of file DestinyManager.cpp.
References ShipSE::GetShipItemRef(), SystemEntity::GetShipSE(), SystemEntity::IsShipSE(), m_shipHeading, m_targetPoint, mySE, ShipItem::SetUndocking(), and SetUndockSpeed().
Referenced by Client::ProcessClient().

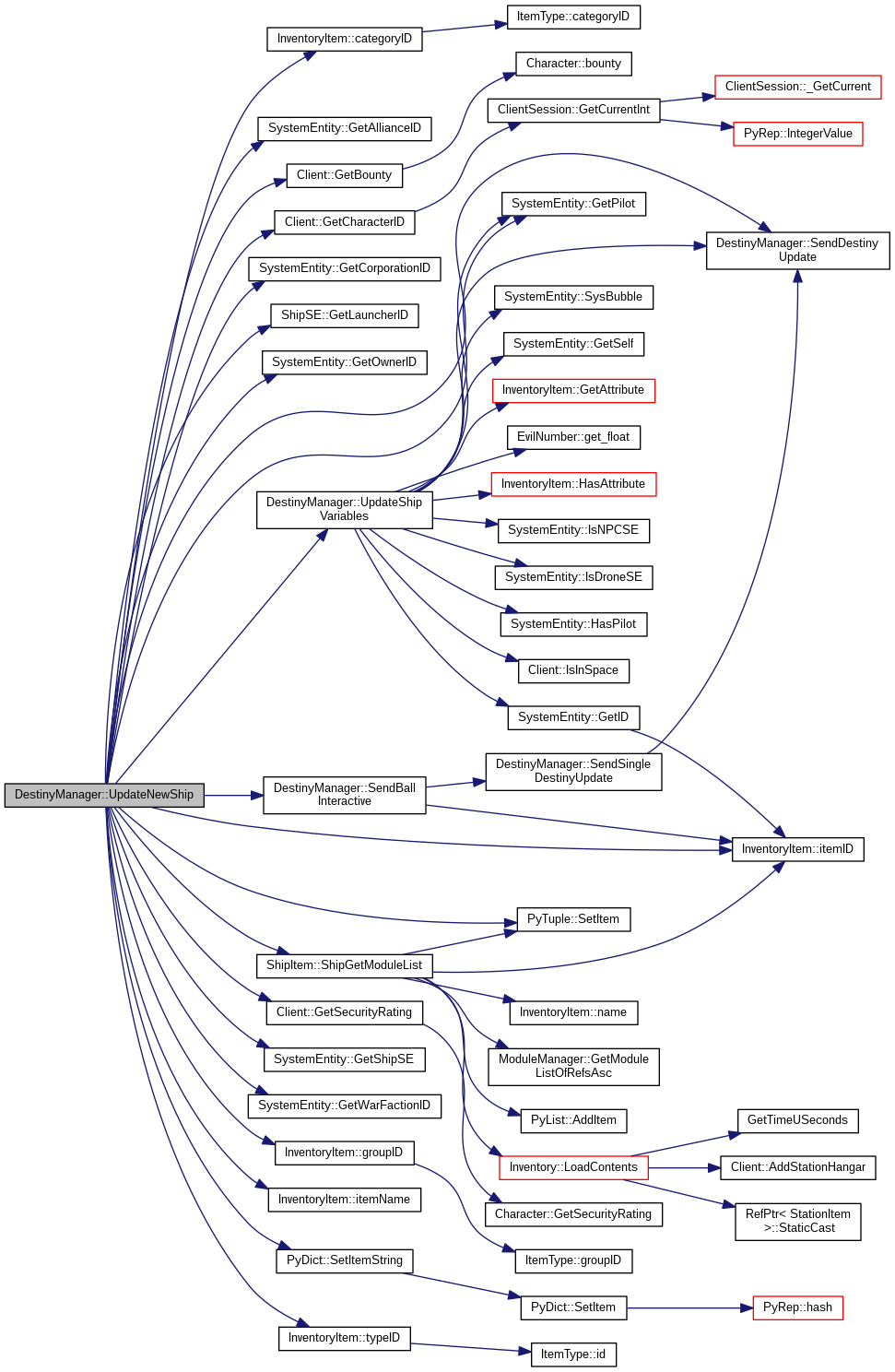
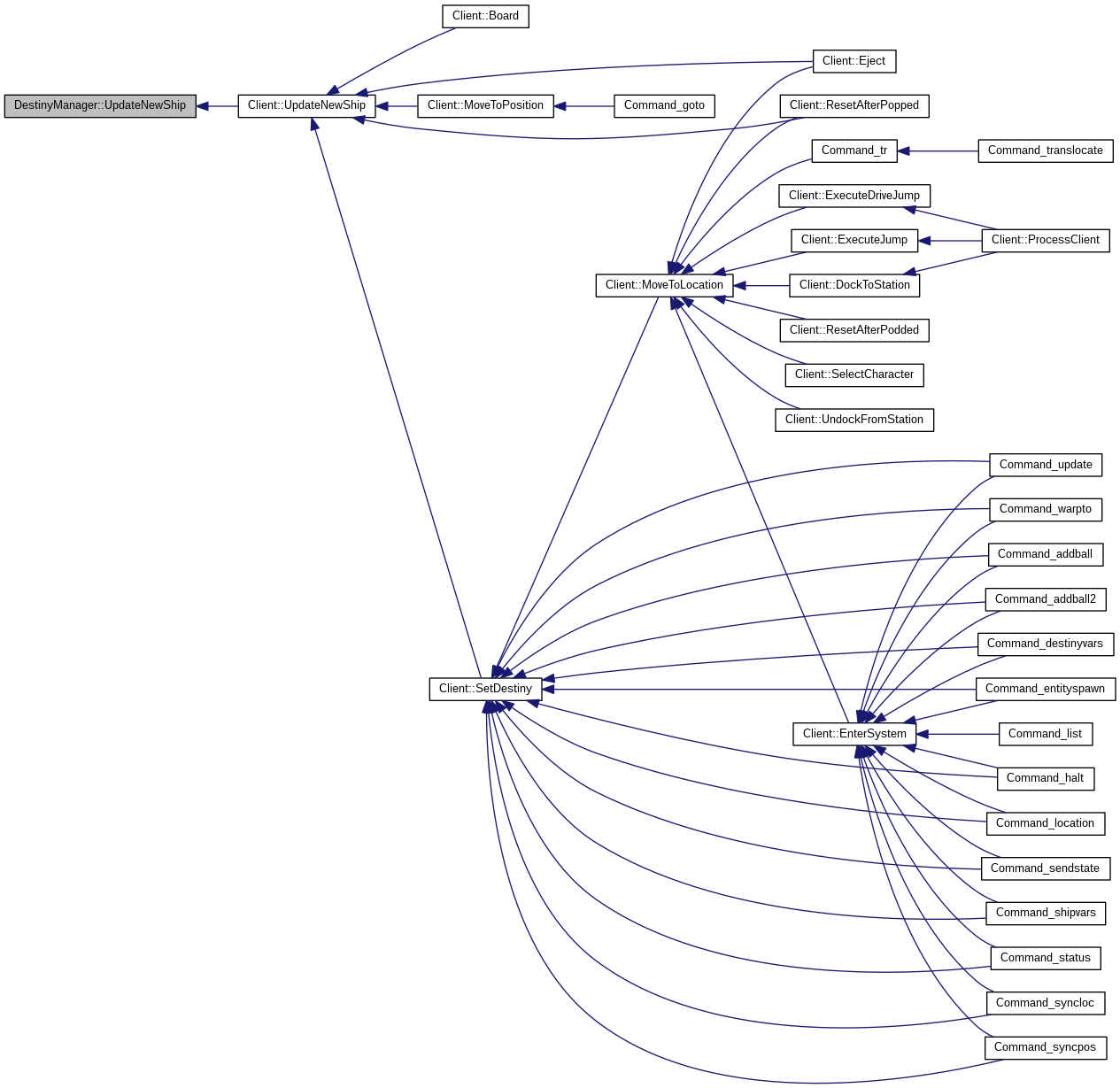
| void DestinyManager::UpdateNewShip | ( | const ShipItemRef | newShipRef | ) |
Definition at line 2597 of file DestinyManager.cpp.
References InventoryItem::categoryID(), SystemEntity::GetAllianceID(), Client::GetBounty(), Client::GetCharacterID(), SystemEntity::GetCorporationID(), ShipSE::GetLauncherID(), SystemEntity::GetOwnerID(), SystemEntity::GetPilot(), Client::GetSecurityRating(), SystemEntity::GetShipSE(), SystemEntity::GetWarFactionID(), InventoryItem::groupID(), IsAlliance, IsCorp, IsFaction, InventoryItem::itemID(), InventoryItem::itemName(), itemTypeCapsule, m_hasSentShipUpdates, mySE, PyStatic, SendBallInteractive(), SendDestinyUpdate(), PyTuple::SetItem(), PyDict::SetItemString(), ShipItem::ShipGetModuleList(), InventoryItem::typeID(), and UpdateShipVariables().
Referenced by Client::UpdateNewShip().
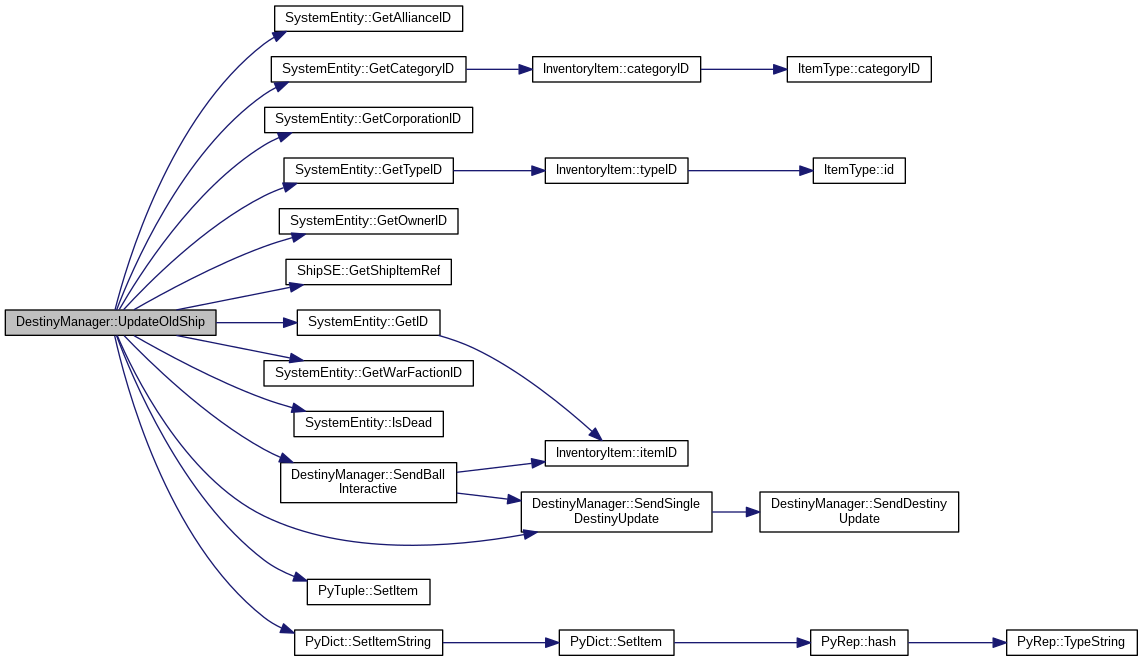
| void DestinyManager::UpdateOldShip | ( | ShipSE * | pShipSE | ) |
Definition at line 2639 of file DestinyManager.cpp.
References SystemEntity::GetAllianceID(), SystemEntity::GetCategoryID(), SystemEntity::GetCorporationID(), SystemEntity::GetID(), SystemEntity::GetOwnerID(), ShipSE::GetShipItemRef(), SystemEntity::GetTypeID(), SystemEntity::GetWarFactionID(), SystemEntity::IsDead(), m_hasSentShipUpdates, PyStatic, SendBallInteractive(), SendSingleDestinyUpdate(), PyTuple::SetItem(), and PyDict::SetItemString().
Referenced by Eject().
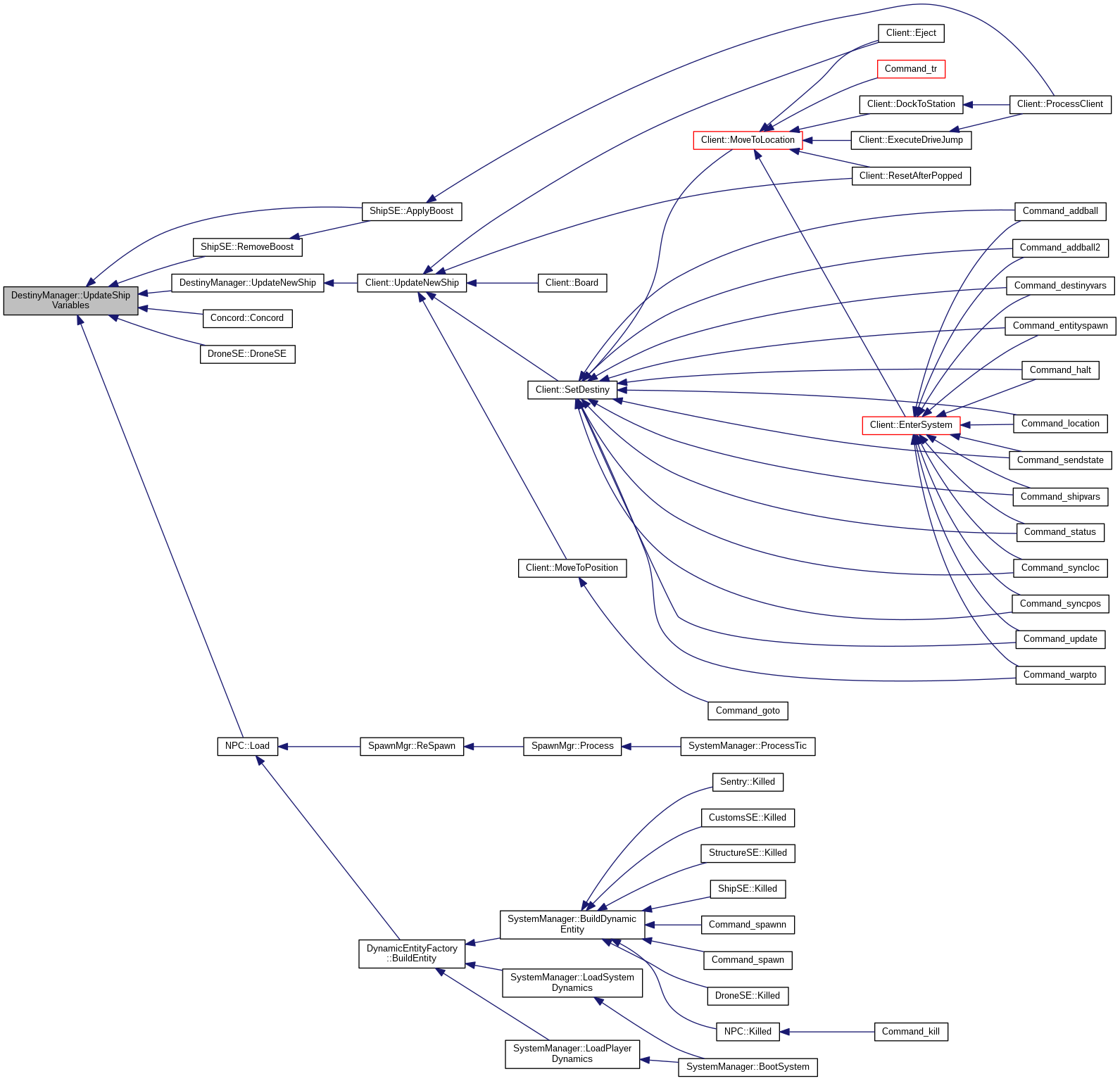
| void DestinyManager::UpdateShipVariables | ( | ) |
Definition at line 2472 of file DestinyManager.cpp.
References AttrEntityCruiseSpeed, AttrInetia, AttrMass, AttrMaxVelocity, AttrWarpCapacitorNeed, AttrWarpSpeedMultiplier, EvilNumber::get_float(), InventoryItem::GetAttribute(), SystemEntity::GetID(), SystemEntity::GetPilot(), SystemEntity::GetSelf(), InventoryItem::HasAttribute(), SystemEntity::HasPilot(), SystemEntity::IsDroneSE(), Client::IsInSpace(), SystemEntity::IsNPCSE(), m_alignTime, m_degPerTic, m_hasSentShipUpdates, m_mass, m_massMKg, m_maxShipSpeed, m_shipAgility, m_shipInertia, m_shipMaxAccelTime, m_shipWarpSpeed, m_speedToLeaveWarp, m_timeToEnterWarp, m_warpCapacitorNeed, mySE, SendDestinyUpdate(), and SystemEntity::SysBubble().
Referenced by ShipSE::ApplyBoost(), Concord::Concord(), DroneSE::DroneSE(), NPC::Load(), ShipSE::RemoveBoost(), and UpdateNewShip().
|
protected |
Definition at line 352 of file DestinyManager.cpp.
References _log, SystemEntity::GetID(), SystemEntity::GetName(), GetTimeMSeconds(), Halt(), is_log_enabled, m_accel, m_activeSpeedFraction, m_ballMode, m_changeDelay, m_currentSpeedFraction, m_decel, m_maxShipSpeed, m_maxSpeed, m_moveTime, m_prevSpeed, m_prevSpeedFraction, m_shipAgility, m_shipHeading, m_shipMaxAccelTime, m_speedToLeaveWarp, m_targBubble, m_turnFraction, m_turning, m_userSpeedFraction, m_velocity, m_warpState, mySE, and Destiny::Ball::Mode::WARP.
Referenced by SetSpeedFraction(), and Turn().
|
private |
Definition at line 1581 of file DestinyManager.cpp.
References _log, DestinyManager::WarpState::accel, DestinyManager::WarpState::accelDist, BUBBLE_RADIUS_METERS, DestinyManager::WarpState::cruise, DestinyManager::WarpState::cruiseDist, DestinyManager::WarpState::decel, SystemBubble::GetID(), SystemEntity::GetID(), SystemEntity::GetName(), is_log_enabled, m_inBubble, m_targBubble, m_targetDistance, m_warpState, mySE, SystemBubble::Remove(), SystemEntity::SysBubble(), and WarpUpdate().
Referenced by InitWarp(), and ProcessState().
|
private |
Definition at line 1619 of file DestinyManager.cpp.
References _log, DestinyManager::WarpState::cruise, DestinyManager::WarpState::decel, DestinyManager::WarpState::decelDist, SystemEntity::GetID(), SystemEntity::GetName(), is_log_enabled, m_targetDistance, m_warpState, mySE, DestinyManager::WarpState::warpSpeed, and WarpUpdate().
Referenced by ProcessState().
|
private |
Definition at line 1635 of file DestinyManager.cpp.
References _log, DestinyManager::WarpState::decelDist, SystemEntity::GetID(), SystemEntity::GetName(), is_log_enabled, m_speedToLeaveWarp, m_targetDistance, m_warpDecelTime, m_warpState, mySE, DestinyManager::WarpState::total_distance, DestinyManager::WarpState::warpSpeed, WarpStop(), and WarpUpdate().
Referenced by ProcessState().
|
private |
Definition at line 1677 of file DestinyManager.cpp.
References _log, NPC::GetAIMgr(), SystemEntity::GetID(), SystemEntity::GetName(), SystemEntity::GetNPCSE(), is_log_enabled, SystemEntity::IsNPCSE(), SystemEntity::IsShipSE(), m_position, m_stop, m_targBubble, m_targetDistance, m_targetPoint, m_warpState, mySE, SafeDelete(), SetSpeedFraction(), DestinyManager::WarpState::warp_vector, NPCAIMgr::WarpOutComplete(), Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by WarpDecel().
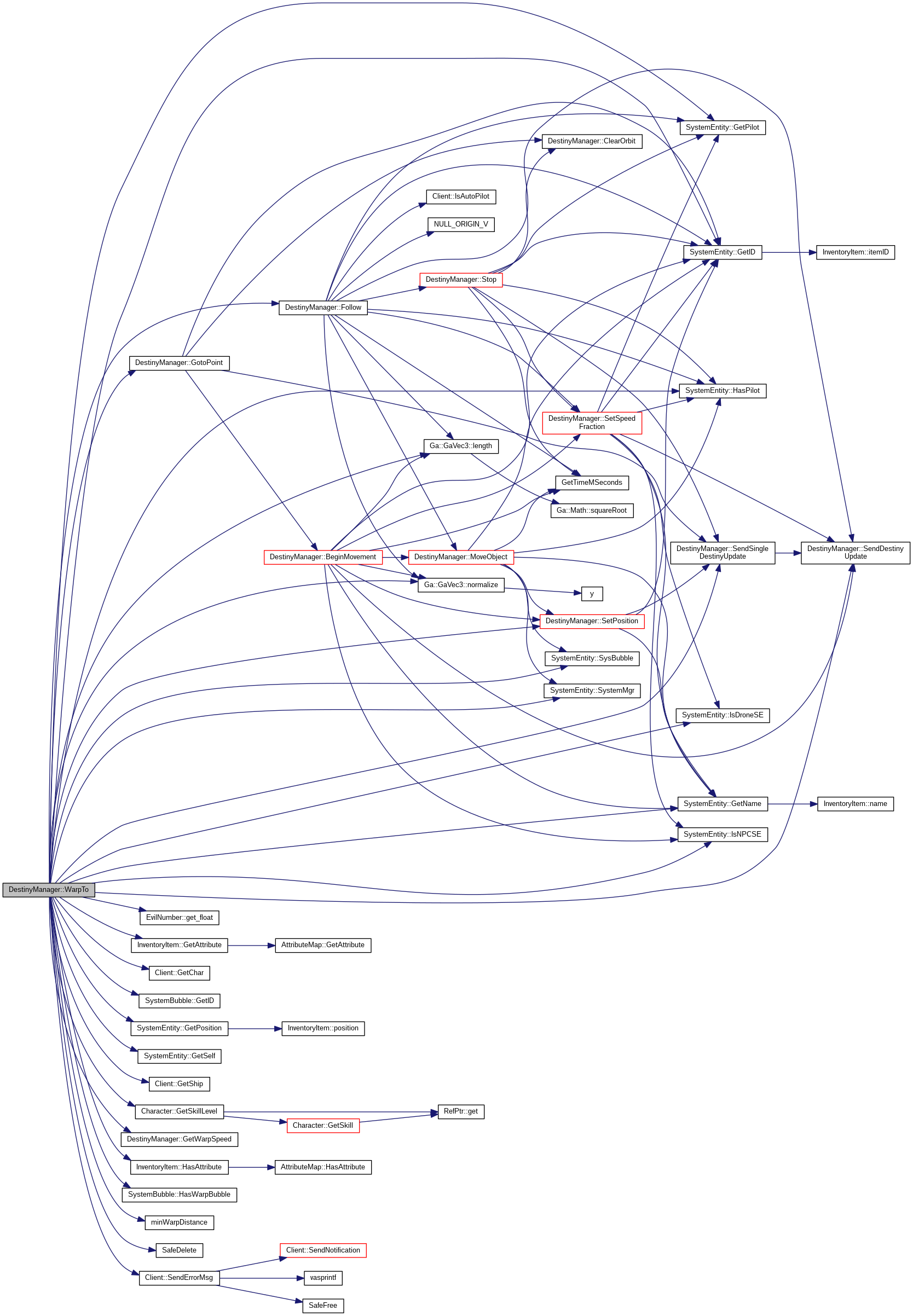
| void DestinyManager::WarpTo | ( | const GPoint & | where, |
| int32 | distance = 0, |
||
| bool | autoPilot = false, |
||
| SystemEntity * | pSE = nullptr |
||
| ) |
Definition at line 1903 of file DestinyManager.cpp.
References _log, AttrCapacitorCharge, AttrWarpBubbleImmune, Follow(), EvilNumber::get_float(), InventoryItem::GetAttribute(), Client::GetChar(), SystemBubble::GetID(), SystemEntity::GetID(), SystemEntity::GetName(), SystemEntity::GetPilot(), SystemEntity::GetPosition(), SystemEntity::GetSelf(), Client::GetShip(), Character::GetSkillLevel(), GetWarpSpeed(), GotoPoint(), InventoryItem::HasAttribute(), SystemEntity::HasPilot(), SystemBubble::HasWarpBubble(), is_log_enabled, SystemEntity::IsDroneSE(), SystemEntity::IsNPCSE(), Ga::GaVec3::length(), m_ballMode, m_capNeeded, m_mass, m_position, m_stopDistance, m_targBubble, m_targetDistance, m_targetEntity, m_targetPoint, m_warpCapacitorNeed, m_warpState, minWarpDistance(), mySE, Ga::GaVec3::normalize(), ONE_AU_IN_METERS, SafeDelete(), sBubbleMgr, sConfig, SendDestinyUpdate(), Client::SendErrorMsg(), SendSingleDestinyUpdate(), SetPosition(), Destiny::Ball::Mode::STOP, SystemEntity::SysBubble(), SystemEntity::SystemMgr(), Destiny::Ball::Mode::WARP, EvESkill::WarpDriveOperation, Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by Command_bubblewarp(), SpawnMgr::ReSpawn(), NPCAIMgr::WarpOut(), and SpawnMgr::WarpOutSpawn().

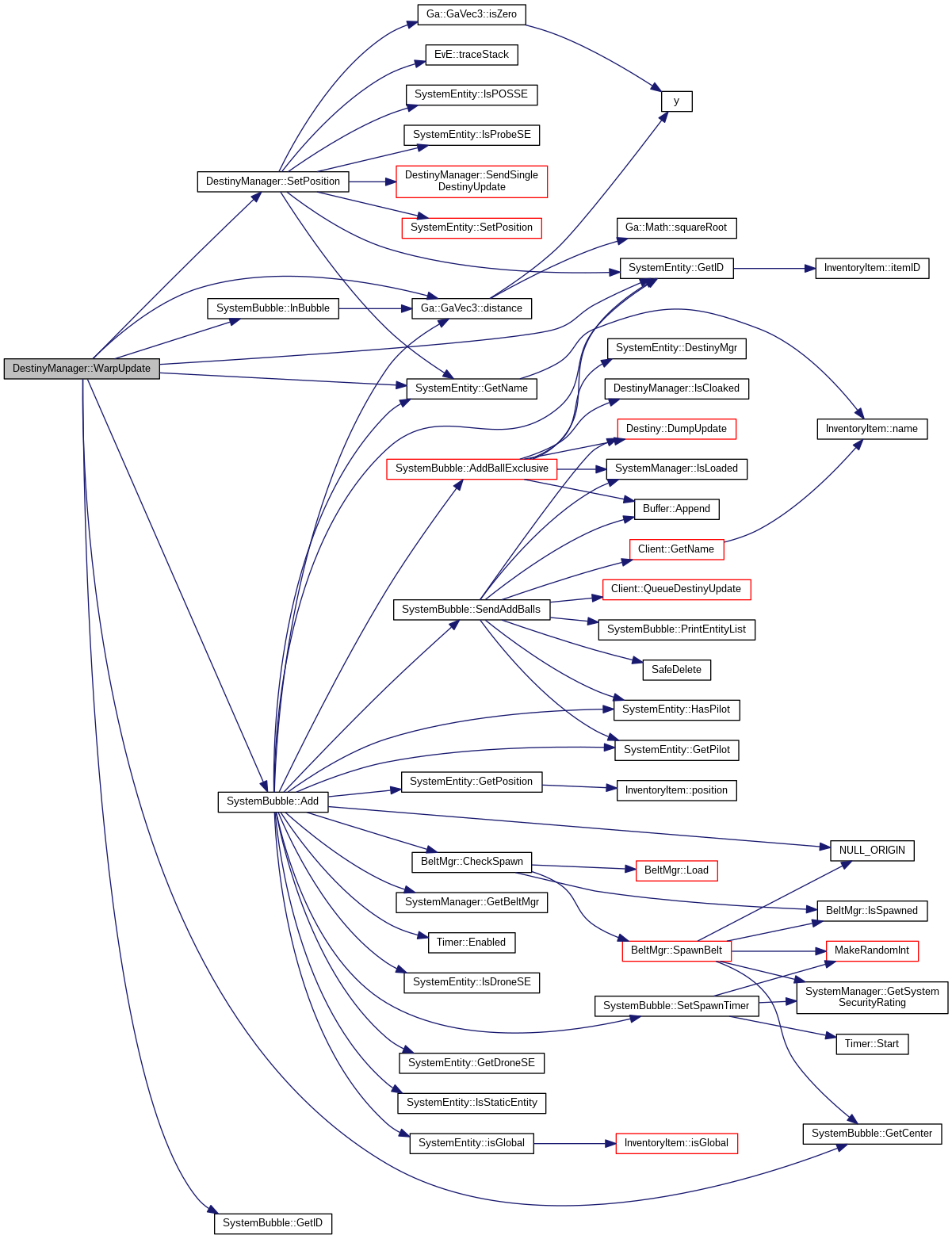
|
private |
Definition at line 1654 of file DestinyManager.cpp.
References _log, SystemBubble::Add(), DestinyManager::WarpState::decel, Ga::GaVec3::distance(), SystemBubble::GetCenter(), SystemBubble::GetID(), SystemEntity::GetID(), SystemEntity::GetName(), SystemBubble::InBubble(), is_log_enabled, m_inBubble, m_position, m_targBubble, m_targetDistance, m_targetPoint, m_velocity, m_warpState, mySE, SetPosition(), DestinyManager::WarpState::warp_vector, Ga::GaVec3::x, Ga::GaVec3::y, and Ga::GaVec3::z.
Referenced by WarpAccel(), WarpCruise(), and WarpDecel().
| void DestinyManager::WebbedMe | ( | InventoryItemRef | modRef, |
| bool | apply = false |
||
| ) |
Definition at line 2452 of file DestinyManager.cpp.
References AttrSpeedFactor, EvilNumber::get_float(), InventoryItem::GetAttribute(), SystemEntity::GetID(), m_activeSpeedFraction, m_hasSentShipUpdates, m_maxShipSpeed, m_userSpeedFraction, mySE, SendDestinyUpdate(), and SetSpeedFraction().
Referenced by ActiveModule::Activate(), and ActiveModule::DeactivateCycle().
|
protected |
Definition at line 262 of file DestinyManager.h.
Referenced by BeginMovement(), DestinyManager(), Halt(), MoveObject(), SetSpeedFraction(), Stop(), TractorBeamStart(), and UpdateVelocity().
|
protected |
Definition at line 286 of file DestinyManager.h.
Referenced by DestinyManager(), Follow(), Halt(), IsTurn(), MoveObject(), Orbit(), SetSpeedFraction(), SetUndockSpeed(), SpeedBoost(), TractorBeamStart(), UpdateVelocity(), and WebbedMe().
|
protected |
Definition at line 234 of file DestinyManager.h.
Referenced by ClearTurn(), GetAlignTime(), SpeedBoost(), Turn(), and UpdateShipVariables().
|
protected |
Definition at line 270 of file DestinyManager.h.
Referenced by Bounce(), EntityRemoved(), Follow(), GetState(), GotoDirection(), GotoPoint(), Halt(), IsFollowing(), IsGoto(), IsOrbiting(), IsStopped(), MakeMissile(), Orbit(), ProcessState(), SetSpeedFraction(), SetUndockSpeed(), Stop(), TractorBeamStart(), UpdateVelocity(), and WarpTo().
|
private |
Definition at line 310 of file DestinyManager.h.
Referenced by Bump(), CheckBump(), and DestinyManager().
|
protected |
Definition at line 242 of file DestinyManager.h.
Referenced by DestinyManager(), InitWarp(), and WarpTo().
|
private |
Definition at line 307 of file DestinyManager.h.
Referenced by DestinyManager(), MoveObject(), SetUndockSpeed(), and UpdateVelocity().
|
protected |
Definition at line 264 of file DestinyManager.h.
Referenced by Cloak(), DestinyManager(), IsCloaked(), Jump(), SetCloak(), and UnCloak().
|
protected |
Definition at line 285 of file DestinyManager.h.
Referenced by BeginMovement(), Bounce(), DestinyManager(), Follow(), GetSpeed(), GetSpeedFraction(), Halt(), IsMoving(), IsTurn(), MoveObject(), ProcessState(), SetSpeedFraction(), SetUndockSpeed(), SpeedBoost(), TractorBeamStart(), Turn(), and UpdateVelocity().
|
protected |
Definition at line 263 of file DestinyManager.h.
Referenced by BeginMovement(), DestinyManager(), Halt(), MoveObject(), SetSpeedFraction(), Stop(), TractorBeamStart(), Turn(), and UpdateVelocity().
|
protected |
Definition at line 252 of file DestinyManager.h.
Referenced by DestinyManager(), SpeedBoost(), Turn(), and UpdateShipVariables().
|
protected |
Definition at line 289 of file DestinyManager.h.
Referenced by ClearOrbit(), Follow(), Halt(), Orbit(), and TractorBeamStart().
|
private |
Definition at line 306 of file DestinyManager.h.
Referenced by IsFrozen(), and SetFrozen().
|
protected |
Definition at line 226 of file DestinyManager.h.
Referenced by BeginMovement(), DestinyManager(), SetSpeedFraction(), SpeedBoost(), UpdateNewShip(), UpdateOldShip(), UpdateShipVariables(), and WebbedMe().
|
protected |
Definition at line 266 of file DestinyManager.h.
Referenced by DestinyManager(), SetBubble(), WarpAccel(), and WarpUpdate().
|
private |
Definition at line 322 of file DestinyManager.h.
Referenced by DestinyManager().
|
private |
Definition at line 323 of file DestinyManager.h.
Referenced by DestinyManager().
|
protected |
Definition at line 232 of file DestinyManager.h.
Referenced by BeginMovement(), GetMass(), MakeMissile(), SpeedBoost(), TractorBeamStop(), UpdateShipVariables(), and WarpTo().
|
protected |
Definition at line 233 of file DestinyManager.h.
Referenced by MakeMissile(), Orbit(), SpeedBoost(), and UpdateShipVariables().
|
protected |
Definition at line 287 of file DestinyManager.h.
Referenced by BeginMovement(), ClearOrbit(), DestinyManager(), Halt(), MoveObject(), and Orbit().
|
protected |
Definition at line 236 of file DestinyManager.h.
Referenced by Bounce(), GetMaxVelocity(), GetSpeed(), MakeMissile(), Orbit(), SetMaxVelocity(), SetUndockSpeed(), SpeedBoost(), TractorBeamStart(), UpdateShipVariables(), UpdateVelocity(), and WebbedMe().
|
protected |
Definition at line 251 of file DestinyManager.h.
Referenced by Bounce(), Follow(), Halt(), MoveObject(), Orbit(), ProcessState(), SetSpeedFraction(), SetUndockSpeed(), SpeedBoost(), TractorBeamStart(), and UpdateVelocity().
|
protected |
Definition at line 291 of file DestinyManager.h.
Referenced by BeginMovement(), Bounce(), Follow(), Halt(), MoveObject(), SpeedBoost(), Stop(), TractorBeamStart(), and UpdateVelocity().
|
protected |
Definition at line 275 of file DestinyManager.h.
Referenced by BeginMovement(), ClearOrbit(), DestinyManager(), Follow(), GotoDirection(), GotoPoint(), MoveObject(), Orbit(), SetSpeedFraction(), and SetUndockSpeed().
|
protected |
Definition at line 281 of file DestinyManager.h.
Referenced by BeginMovement(), ClearOrbit(), ComputePosition(), DestinyManager(), GetRadTic(), and Orbit().
|
protected |
Definition at line 280 of file DestinyManager.h.
Referenced by ClearOrbit(), ComputePosition(), DestinyManager(), and Orbit().
|
protected |
Definition at line 257 of file DestinyManager.h.
Referenced by AttemptDockOperation(), BeginMovement(), ClearTurn(), ComputePosition(), DestinyManager(), DockingAccepted(), Follow(), GetPosition(), InitWarp(), IsAligned(), IsTurn(), MakeMissile(), MoveObject(), Orbit(), ProcessState(), SetPosition(), TractorBeamStart(), WarpStop(), WarpTo(), and WarpUpdate().
|
protected |
Definition at line 235 of file DestinyManager.h.
Referenced by DestinyManager(), Halt(), MoveObject(), SetSpeedFraction(), SpeedBoost(), Stop(), and UpdateVelocity().
|
protected |
Definition at line 283 of file DestinyManager.h.
Referenced by DestinyManager(), Follow(), Halt(), MoveObject(), SetSpeedFraction(), SetUndockSpeed(), SpeedBoost(), Stop(), and UpdateVelocity().
|
protected |
Definition at line 255 of file DestinyManager.h.
Referenced by ClearTurn(), IsTurn(), and Turn().
|
protected |
Definition at line 241 of file DestinyManager.h.
Referenced by ComputePosition(), DestinyManager(), Follow(), GetRadius(), and Orbit().
|
protected |
Definition at line 245 of file DestinyManager.h.
Referenced by BeginMovement(), GetAgility(), Halt(), MakeMissile(), MoveObject(), Orbit(), SetSpeedFraction(), SpeedBoost(), Stop(), Turn(), UpdateShipVariables(), and UpdateVelocity().
|
protected |
Definition at line 294 of file DestinyManager.h.
Referenced by BeginMovement(), Bounce(), DestinyManager(), Follow(), GetHeading(), Halt(), IsAligned(), IsTurn(), MakeMissile(), MoveObject(), Orbit(), ProcessState(), SetUndockSpeed(), TractorBeamStart(), Turn(), Undock(), and UpdateVelocity().
|
protected |
Definition at line 247 of file DestinyManager.h.
Referenced by BeginMovement(), GetInertia(), MakeMissile(), Orbit(), SpeedBoost(), Turn(), and UpdateShipVariables().
|
protected |
Definition at line 253 of file DestinyManager.h.
Referenced by BeginMovement(), Bounce(), GetAccelTime(), Halt(), MoveObject(), SetSpeedFraction(), SetUndockSpeed(), SpeedBoost(), Stop(), TractorBeamStart(), UpdateShipVariables(), and UpdateVelocity().
|
protected |
Definition at line 237 of file DestinyManager.h.
Referenced by GetWarpSpeed(), InitWarp(), and UpdateShipVariables().
|
protected |
Definition at line 239 of file DestinyManager.h.
Referenced by GetWarpDropSpeed(), UpdateShipVariables(), UpdateVelocity(), and WarpDecel().
|
protected |
Definition at line 278 of file DestinyManager.h.
Referenced by BeginMovement(), Bounce(), DestinyManager(), Follow(), GetStateStamp(), Halt(), InitWarp(), MakeMissile(), MoveObject(), Orbit(), ProcessState(), SetUndockSpeed(), Stop(), and TractorBeamStart().
|
protected |
Definition at line 261 of file DestinyManager.h.
Referenced by BeginMovement(), Bounce(), DestinyManager(), Halt(), MakeMissile(), MoveObject(), SetSpeedFraction(), SetUndockSpeed(), Stop(), TractorBeamStart(), and WarpStop().
|
protected |
Definition at line 272 of file DestinyManager.h.
Referenced by GetDistance(), Halt(), and WarpTo().
|
protected |
Definition at line 222 of file DestinyManager.h.
Referenced by UpdateVelocity(), WarpAccel(), WarpStop(), WarpTo(), and WarpUpdate().
|
protected |
Definition at line 290 of file DestinyManager.h.
Referenced by BeginMovement(), ClearOrbit(), ComputePosition(), Follow(), GetFollowDistance(), Halt(), InitWarp(), MakeMissile(), Orbit(), SetSpeedFraction(), TractorBeamStart(), WarpAccel(), WarpCruise(), WarpDecel(), WarpStop(), WarpTo(), and WarpUpdate().
|
protected |
Definition at line 296 of file DestinyManager.h.
Referenced by ComputePosition(), DestinyManager(), EntityRemoved(), Follow(), GetTargetEntity(), GetTargetID(), Halt(), IsTargetInvalid(), MakeMissile(), Orbit(), SetSpeedFraction(), TractorBeamStart(), and WarpTo().
|
protected |
Definition at line 295 of file DestinyManager.h.
Referenced by BeginMovement(), DestinyManager(), IsTurn(), and Turn().
|
protected |
Definition at line 293 of file DestinyManager.h.
Referenced by BeginMovement(), DestinyManager(), Follow(), GetTargetPoint(), GotoDirection(), GotoPoint(), Halt(), InitWarp(), IsTurn(), MakeMissile(), Orbit(), ProcessState(), TractorBeamStart(), Undock(), WarpStop(), WarpTo(), and WarpUpdate().
|
protected |
Definition at line 238 of file DestinyManager.h.
Referenced by ClearTurn(), GetWarpTime(), ProcessState(), and UpdateShipVariables().
|
protected |
Definition at line 267 of file DestinyManager.h.
Referenced by DestinyManager(), Follow(), IsTractored(), MoveObject(), TractorBeamStart(), and TractorBeamStop().
|
protected |
Definition at line 268 of file DestinyManager.h.
Referenced by DestinyManager(), Follow(), and MoveObject().
|
protected |
Definition at line 282 of file DestinyManager.h.
Referenced by ClearTurn(), DestinyManager(), Turn(), and UpdateVelocity().
|
protected |
Definition at line 265 of file DestinyManager.h.
Referenced by BeginMovement(), ClearTurn(), DestinyManager(), Halt(), InitWarp(), IsTurning(), MoveObject(), TractorBeamStart(), Turn(), and UpdateVelocity().
|
protected |
Definition at line 274 of file DestinyManager.h.
Referenced by BeginMovement(), ClearTurn(), DestinyManager(), MoveObject(), and Turn().
|
protected |
Definition at line 284 of file DestinyManager.h.
Referenced by BeginMovement(), Bounce(), DestinyManager(), Follow(), Halt(), MoveObject(), ProcessState(), SetSpeedFraction(), SetUndockSpeed(), SpeedBoost(), Stop(), TractorBeamStart(), UpdateVelocity(), and WebbedMe().
|
protected |
Definition at line 258 of file DestinyManager.h.
Referenced by Bounce(), DestinyManager(), Follow(), GetVelocity(), Halt(), MoveObject(), ProcessState(), SetUndockSpeed(), TractorBeamStart(), UpdateVelocity(), and WarpUpdate().
|
protected |
Definition at line 229 of file DestinyManager.h.
Referenced by InitWarp().
|
protected |
Definition at line 243 of file DestinyManager.h.
Referenced by GetCapNeed(), UpdateShipVariables(), and WarpTo().
|
protected |
Definition at line 230 of file DestinyManager.h.
Referenced by InitWarp(), and WarpDecel().
|
private |
Definition at line 374 of file DestinyManager.h.
Referenced by Halt(), InitWarp(), IsWarping(), ProcessState(), UpdateVelocity(), WarpAccel(), WarpCruise(), WarpDecel(), WarpStop(), WarpTo(), WarpUpdate(), and ~DestinyManager().
|
private |
Definition at line 327 of file DestinyManager.h.
Referenced by ~DestinyManager().
|
protected |
Definition at line 221 of file DestinyManager.h.
Referenced by AttemptDockOperation(), BeginMovement(), Bounce(), Bump(), CheckBump(), Cloak(), DestinyManager(), DockingAccepted(), Eject(), EntityRemoved(), Follow(), GotoDirection(), GotoPoint(), Halt(), InitWarp(), IsTargetInvalid(), IsTurn(), Jump(), MakeMissile(), MoveObject(), Orbit(), Process(), ProcessState(), SendAnchorDrop(), SendAnchorLift(), SendCloakFx(), SendDestinyUpdate(), SendJettisonPacket(), SendJumpInEffect(), SendJumpOut(), SendJumpOutEffect(), SendSetState(), SetMaxVelocity(), SetPosition(), SetSpeedFraction(), SetUndockSpeed(), SpeedBoost(), Stop(), TractorBeamStart(), TractorBeamStop(), Turn(), UnCloak(), Undock(), UpdateNewShip(), UpdateShipVariables(), UpdateVelocity(), WarpAccel(), WarpCruise(), WarpDecel(), WarpStop(), WarpTo(), WarpUpdate(), and WebbedMe().
 1.8.8
1.8.8 
